






一根神奇的“纤维”,造就六篇《Science》,剑指人工肌肉!
2021-03-10
人工肌肉(Artificial muscle),指的是在受到外部物理刺激或化学刺激后会改变形状的材料或者装置,不仅包括通过生物技术模仿实际动物肌肉结构的新型智能形状记忆材料,还包括通过消耗电,磁或化学能来改变状态来产生动力的致动器。

图1. 人工肌肉模型图
与传统的电动机驱动相比,人工肌肉具有许多优点,如无复杂连接装置、多功能性、高功率重量比和高应力重量比等等。过去十年来,人工肌肉技术在仿生机器人、机器人假肢和外骨骼、医疗机器人、软机器人等应用中展现出巨大的潜力。
人工肌肉领域先驱,美国国家工程院院士Ray H. Baughman
提起人工肌肉材料,就不得不想到国际著名纳米材料科学家Ray H. Baughman教授。
Ray H.Baughman教授是美国国家工程院院士、俄罗斯自然科学院外籍院士、德克萨斯医学工程科学学院院士、美国化学家协会和物理学会高级会员;中国八所大学的名誉教授;并在《Science》等期刊的编辑或顾问委员会任职。1964年在卡内基梅隆大学获物理学学士学位,1971年在哈佛大学获材料科学博士学位。2001年成为德克萨斯大学达拉斯分校罗伯特·韦尔奇教授、纳米科技研究所主任。
Ray H.Baughman教授在碳纳米材料、导电高分子材料、人工肌肉材料、储能以及能量转换器件等方面的研究都取得了瞩目的科学成就。近年来发表高水平论文440余篇,包括国际顶级期刊Science 、Nature 20余篇,引用次数高达45000余次,H指数为88,申请美国专利90余项。其中很多成果为相关领域的科学研究提供了思路,为该领域的工业突破提供了重要的理论根据,受到了世界范围内科研、工业、商业等领域工作者的赞誉。由于杰出的科研贡献,Ray H. Baughman教授先后获得美国化学协会化学先锋奖、美国化学会高分子科学与工程合作研究奖、Avantex国际纺织论坛新材料创新奖等奖项。
神奇的碳纳米管纱线
除了传统的形状记忆材料,还有一种神奇的人工肌肉材料–碳纳米管纱线(Carbon nanotube yarns)。该材料源自碳纳米管——一种具有特殊结构的一维量子材料,径向尺寸为纳米量级、轴向尺寸为微米量级、管子两端基本都有封口。外形上,它是由呈六边形排列的碳原子构成的数层同轴圆管,层与层之间的固定距离约 0.34 nm,而圆管的直径一般为 2~20 nm。
图2. 碳纳米管纱线示意图
简单来说,碳纳米管纱线就是通过拉伸和松弛、由碳基纳米管纤维制成的紧密绞合的纱线。值得注意的是,仅仅需要给与适当的外界刺激,如加热、拉伸、扭转、电加热等,即可获得具有刺激响应和优异性能的人工肌肉材料。
基于碳纳米管纱线的人工肌肉材料由Baughman教授团队首次提出,并多次在该领域取得突破性进展,研究成果分别于2012、2014、2017、2019和2021年发表在国际顶级期刊《Science》上,具体梳理如下:
2012年《Science》:新型碳纳米管纱线人工肌肉,力量可达人类肌肉的85倍
2012年11月16日,美国德克萨斯大学达拉斯分校Ray H. Baughman教授课题组研发出一种新型人工肌肉,不仅承重能力达到自身重量的 10万倍,而且产生的力量是人类肌肉的85倍!据悉,该新型人工肌肉主要是由碳纳米管纱线和石蜡制成的,可以模仿肌肉收缩产生力量。研究成果以“Electrically, Chemically, and Photonically Powered Torsional and Tensile Actuation of Hybrid Carbon Nanotube Yarn Muscles”为题,发表在国际顶级期刊《Science》上。
研究成员将石蜡嵌入经过编织形成一种特殊结构的碳纳米管纤维中,通过直接加热、电加热或者使用一道闪光,石蜡就会发生体积膨胀,使整个“肌肉”膨胀。同时由于碳纳米管纤维特殊的结构,“肌肉”的长度会同时发生收缩,从而产生了力量。而且,这种人工肌肉进行快速收缩,所需要的时间只有千分之二十五秒,功率密度可达到4.2 kW/kg,是普通内燃机的4倍。
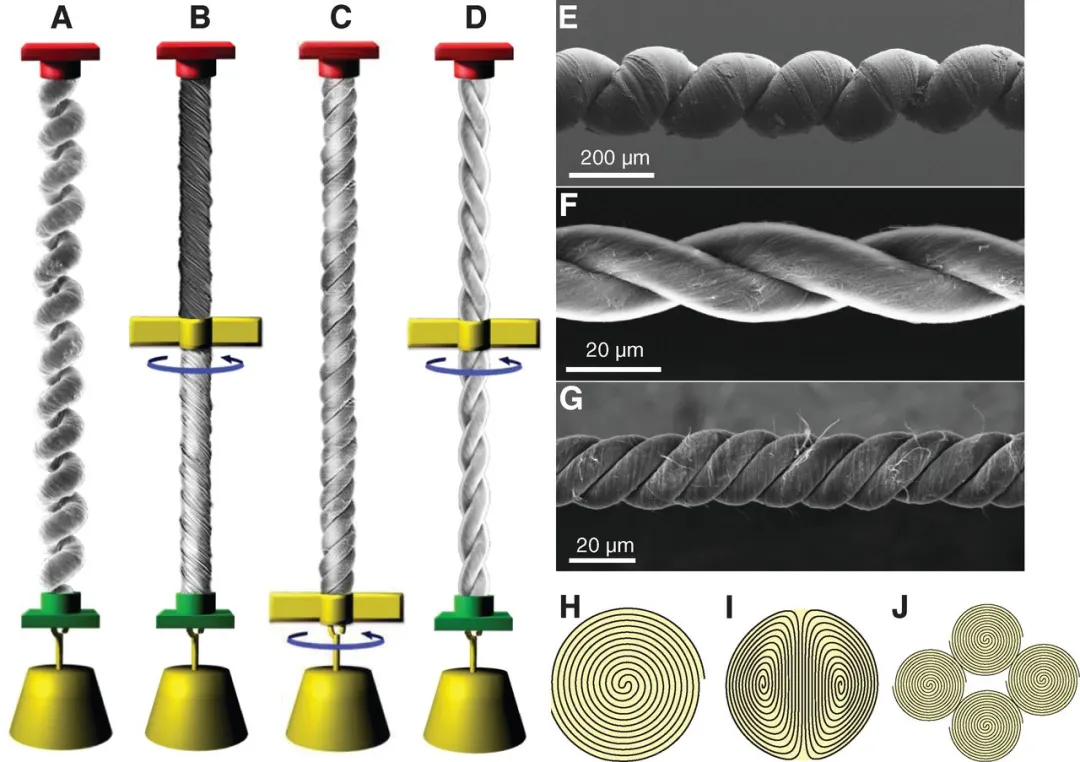
图3. 新型碳纳米管纱线人工肌肉。来源Science
尽管一根碳纳米管的直径只有人头发丝的万分之一,但是强度却是钢铁的100倍。Baughman教授表示:“我们研发的这款人工肌肉力量超强、收缩迅速,它能提起的重量是正常肌肉的200倍。” 这种人工肌肉能够高度扭曲卷绕,与飞行模型使用的橡胶带类似。充满石蜡的纳米纱在用电或者脉冲光加热时打开,停止加热时逐渐冷却,朝着相反的方向扭曲。在安装桨型装置情况下,平均旋转速度可达到每分钟11500圈,可旋转200多万次。
此外,新型人工肌肉可编、可缝、编成辫子和打结,可用于制造智能自驱动材料和布料。Baughman教授指出,纳米纱制造的布料能够随着温度的变化进行调节,或者在接触化学物质时提供额外保护。这种新型材料能够经受住比钢铁熔点高出1000摄氏度的高温考验,可用于生产对化学物质进行自适应的调节流量阀以及对周围环境进行自适应的智能百叶窗。
2014年《Science》:廉价钓鱼线和缝纫线揉捻成人工肌肉纤维,力量强过人类肌肉百倍
人工肌肉纤维通常由金属线或者纳米碳管制成,尽管功能强大,但成本高昂且难以驾驭。
鉴于此,2014年2月20日,美国德克萨斯大学达拉斯分校Ray H. Baughman教授利用聚乙烯和尼龙制成的高强度聚合物,将其扭曲盘绕成束,研发出强韧且成本低廉的人工肌肉纤维,其力量强过人类肌肉百倍,可以应用于制作机器人、义肢,或是能随温度调节缝隙大小的“智能型”布料。值得注意的是,在日常生活中,这种材质经常被用来制作钓鱼线和缝纫线。研究成果以“Artificial muscles from fishing line and sewing thread”为题,发表在国际顶级期刊《Science》上。

研究人员把高强度的高分子聚合物钓鱼线和缝纫线搓捻、盘绕在一起,缝纫线外面涂有一层金属涂层,或直接用金属丝和肌肉捻在一起,通电让其产生温差,这种人工肌肉就是靠温差产生的冷热改变而工作的。搓捻的聚合物纤维就像扭力肌肉,能使一个较重的转轮达到每分钟一万转。然后增加捻数直到聚合纤维卷得像一根紧扭的橡胶带,这样就成了一种能沿自身长度方向剧烈收缩的肌肉。温度升高即加热时能沿自身长度方向剧烈收缩,变冷后又会恢复到原来长度。如果盘绕方向和纤维最初的搓捻方向不同,就会反过来变成加热扩张、制冷收缩。扭曲的纤维在温度变化下可以产生很大的形变,这种形变不仅仅是源于熵弹性,还在于高分子链之前很强的相互作用力。
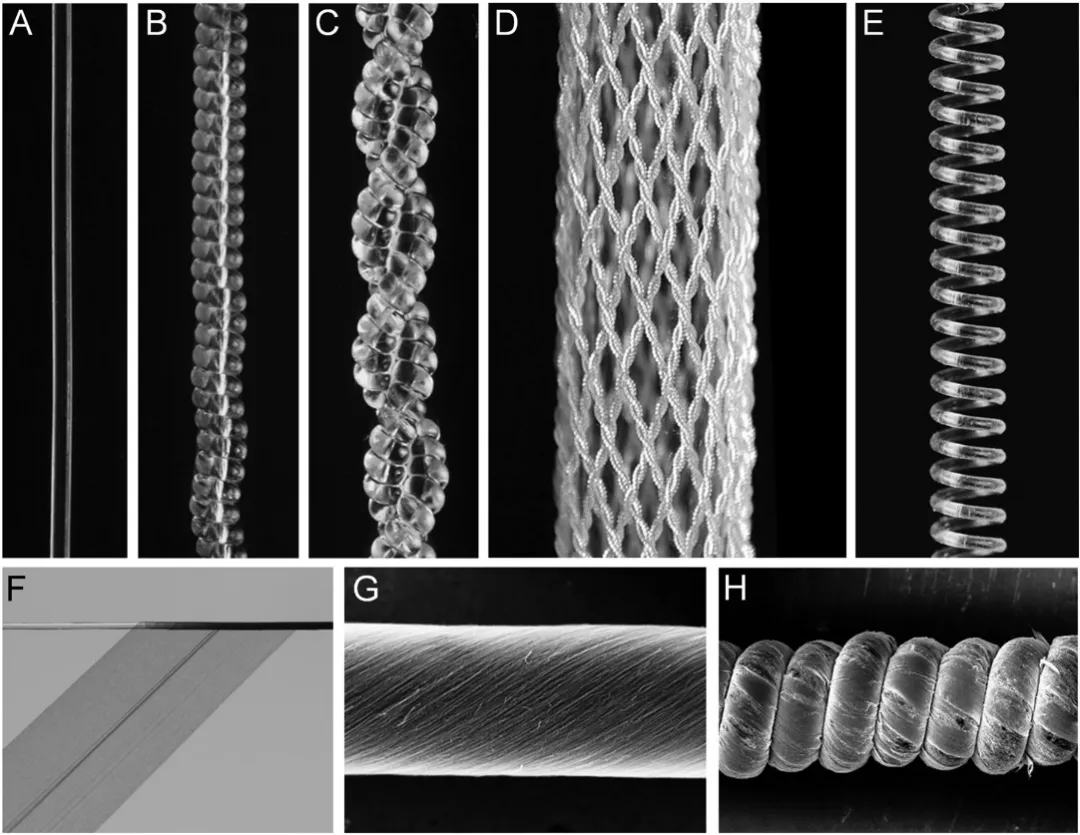
图4. 钓鱼线和缝纫线搓捻制成的人工肌肉。来源Science
论文通讯作者Baughman教授表示,“这种聚合物肌肉能举起的重量超过同样大小天然肌肉的100倍。”实验过程中,他们把钓鱼线盘绕成束、其直径相当于一根头发的10倍,由此制成的一根人工肌肉纤维能够举起16磅(约合7.3公斤)的重物,如果依照人类肌肉的组成方式、把100根人工肌肉纤维盘绕在一起,则能承受接近1吨的重量。
2017年《Science》: 能发电的碳纳米管纱线,只需拉伸或扭转
2017年8月25日,德克萨斯大学达拉斯分校Ray H. Baughman教授和韩国汉阳大学Seon Jeong Kim教授等人研发出一种“Twistron”发电机,通过碳纳米管纺纱线,在不需要外部偏置电压的情况下,就可以将拉伸或扭转的机械能转换变成电能。研究成果以“Harvesting electrical energy from carbon nanotube yarn twist”为题,发表在国际顶级期刊《Science》上。
“Twistron”发电机本质上是一种无需外加电压的电容器,它由多根碳纳米管纺成,纱线电极的总直径在50~70 μm之间。为了提高纱线的弹性,研究者不断提高纱线的捻度,从而使得纱线呈类似弹簧的螺旋结构(图5)。
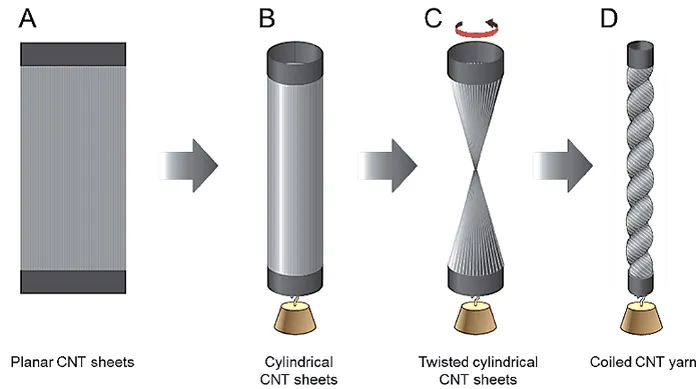
图5. “Twistron”发电机制备过程示意图。图片来源:Science
随后,研究人员将“Twistron”涂上或浸泡在电解质中,使得电解质中的离子会自动插入到纱线中。当纱线被拉伸或扭转时,纱线上的电荷彼此靠近,电压增高,从而产生电能。实验表明,当纱线拉伸30%时,开路电压增加140 mV;当纱线拉伸50%、拉伸频率12 Hz时,输出的峰值功率可以达到179 W/kg。
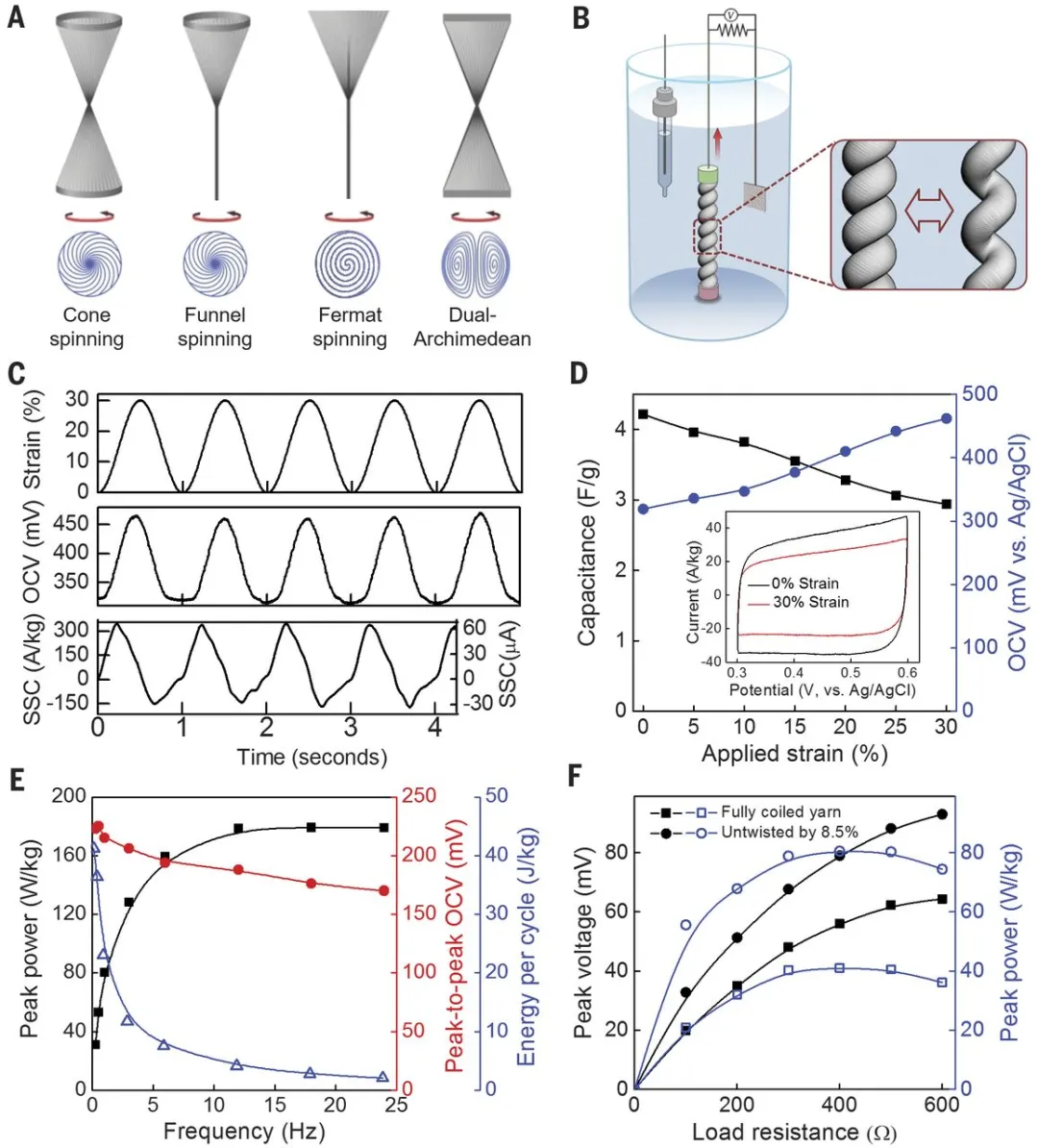
图6.纺线方法拓扑结构及电化学测试示意图。图片来源:Science
研究者设想“Twistron”可以在海浪运动中将动能转化成电能,随后他们进行了简单的尝试,将电极系在气球下端,浸入到海底。每当海浪到来时,气球就会上升,拉伸纱线。结果显示,海波的频率范围为0.9~1.2 Hz,开路电压可以达到46 mV,平均输出功率1.66 W/kg。
在实验室里,研究者还测试了一根重量小于苍蝇的Twistron纱线。结果发现,每次被拉伸后,纱线产生的电能可以点亮一个小型LED。此外,他们还将“Twistron”缝在纺织品中,用作自供电呼吸传感器,无需额外提供电源。在人体正常呼吸时,随着胸腔的起伏,纱线被拉伸并产生电信号。
2019年《Science》:鞘驱动人工肌肉
两年前,Baughman教授等人报道了碳纳米管人工肌肉(hybrid yarn artificial muscles,HYAMs)的。这种人工肌肉通过碳纳米管的拉伸和扭转提供驱动力,收缩功可以达到人体肌肉的29倍。然而,这一工作存在一个严峻的问题:制备成本高昂;而且只有部分纤维做功,靠近纱线中心的部分没有得到充分利用。

为了解决这些问题,美国德克萨斯大学达拉斯分校Ray Baughman课题组提出了一种新型人工肌肉驱动模式——鞘驱动人工肌肉(sheath-run artificial muscles,SRAMs),扭转驱动力来自于包裹在外面的廉价鞘层。该设计具有鞘-芯双层结构(图7):肌肉内芯采用扭曲或盘绕的CNT纱线,外壳选用聚(环氧乙烷)与四氟乙烯和乙烯基醚磺酰氟(SFVE)共聚物的混合物(PEO-SO3),或者弹性聚氨酯(PU)等。
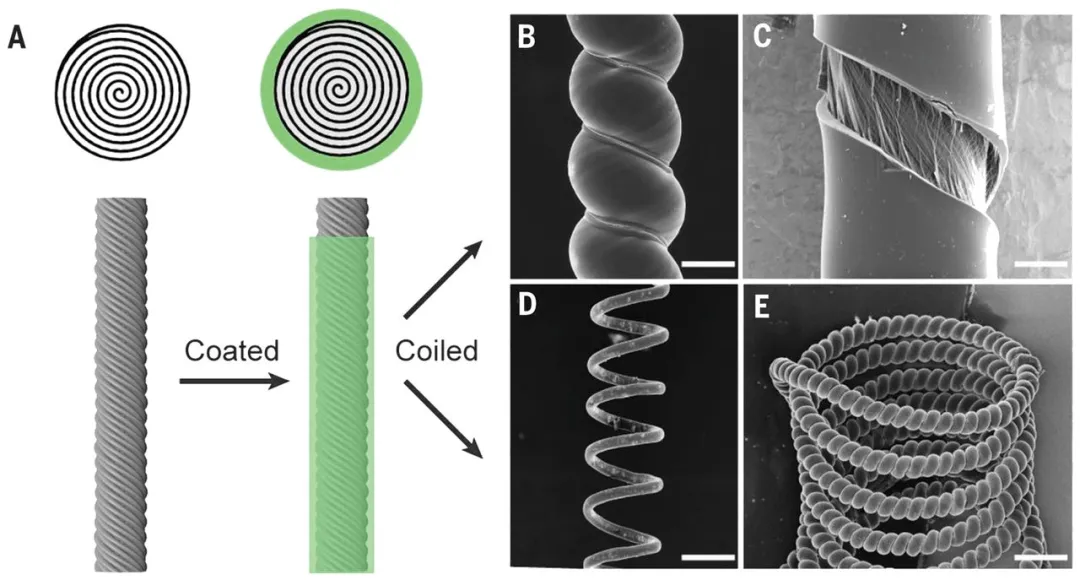
图7. 鞘-芯双层结构的人工肌肉。来源Science
据悉,新型人工肌肉可以通过乙醇蒸汽吸收驱动或者电热驱动,实现可逆的扭转。乙醇蒸汽吸收驱动和电热驱动的PEO-SO3@CNT,分别可以产生4.44 W/g和2.6 W/g的平均收缩功率输出,这一改进将人工肌肉的工作能力提高了1.7-2.15倍(与此前的HYAMs相对比),更是人体肌肉收缩功率(0.05 W/g)的几十倍。
“新型的鞘驱动肌肉,只需要将能量注入鞘内便可将热能施加到整个人工肌肉,用以转化为机械能。”研究者称。此外,商用尼龙、丝线、竹纱线以及电纺聚丙烯腈(PAN)纳米纤维可以代替内部的CNT,降低制备成本,同时利用蒸汽吸收驱动可以不受卡诺循环的限制,比热驱动更节能。
2019年《Science》:柔性制冷新策略——“扭热制冷”
2019年10月11日南开大学刘遵峰教授与美国德克萨斯州立大学达拉斯分校Ray Baughman教授团队提出了一种柔性制冷新策略——“扭热制冷”。研究发现,改变纤维内部的捻度可以实现降温。使用“弹热制冷”技术的降温:拉长7倍的橡胶收缩降温为12.2摄氏度。如果将伸长和加捻均释放,该‘扭热制冷’降温可达16.4摄氏度。“扭热制冷’”技术的卡诺效率可以达到67%,高于如今被广泛应用的空气压缩原理制冷,其卡诺效率一般低于60%。此外,扭转制冷体积更小且适用于天然橡胶、钓鱼线以及镍钛合金等多种普通材料。基于这种方法制成的“扭热冰箱”让绿色制冷变得前景可期。
相关论文以“Torsional refrigeration by twisted, coiled, and supercoiled fibers”为题,发表在国际顶级期刊《Science》上。
具体来说,研究人员首先将橡胶弹性体两端固定,从一端旋转加捻使其形成超螺旋结构,并将其拉长一倍(100% 应变),随后快速释放即可实现降温 15.5 摄氏度。并且,获得相同降温效果的情况下,“扭热制冷”的体积仅为“弹热制冷”的 2/7,“扭热制冷”的卡诺效率可达 67%。
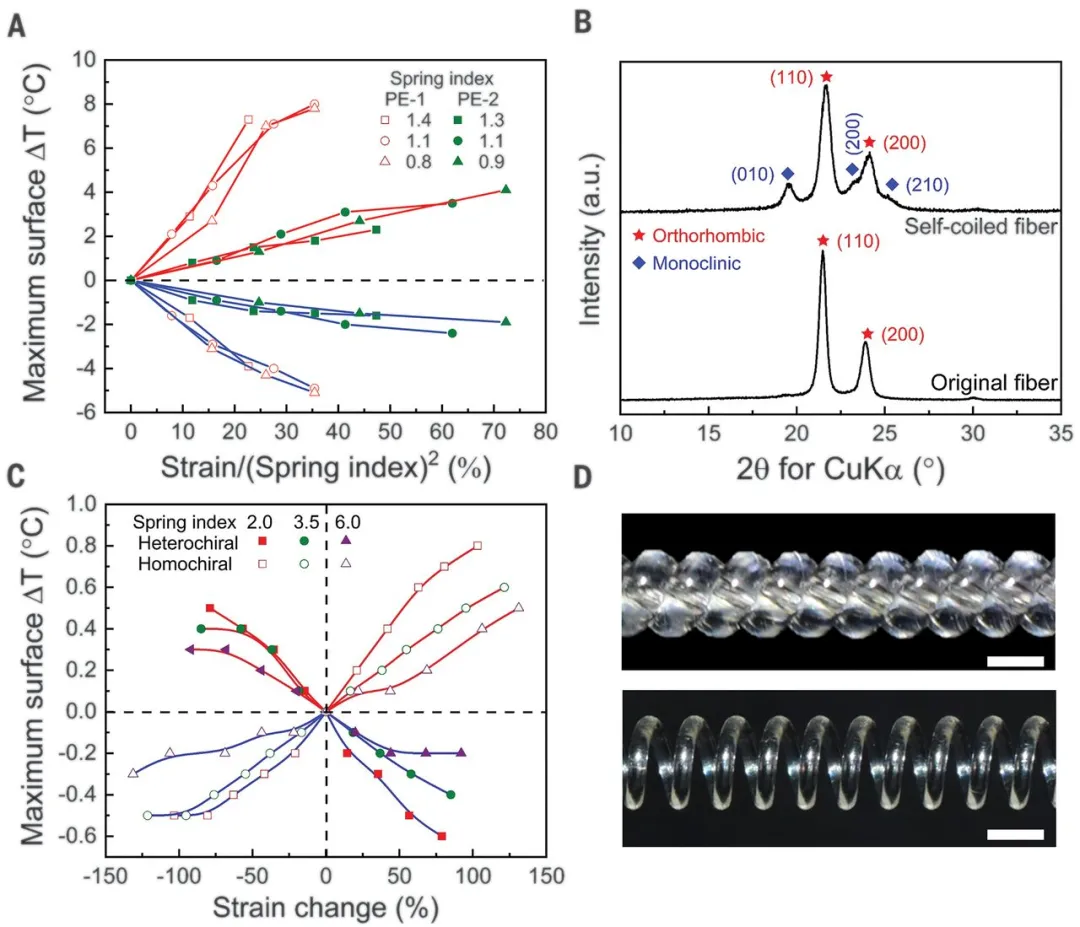
图8. 弹性体旋转加捻称超螺旋结构. 来源Science
除了橡胶,普通的钓鱼线也能实现“扭热制冷”。研究还发现,强度更大、传热更快的镍钛形状记忆合金制冷效果更佳,较低的捻度就会获得比较大的降温。记忆合金之所以能如此,是因为其晶体组织能够在不同温度下进行形状切换。
研究还显示,将 4 根镍钛合金丝加捻并解捻,最大降温可达 20.8 摄氏度,其一个制冷周期只有 30 秒左右。他们还制作了一个基于“扭热制冷”的冰箱模型,使用 3 根镍钛合金丝每厘米旋转 0.87 圈,可以让周围的流水获得 7.7 摄氏度的降温。
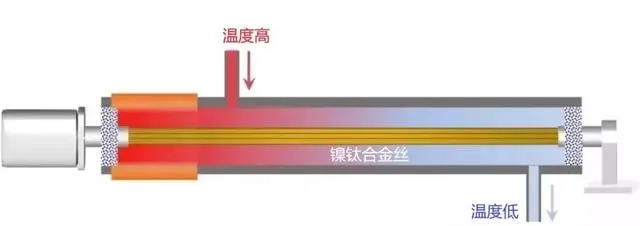
图9. 扭热冰箱模型。来源Science
2021年《Science》: 单极冲程、电渗泵碳纳米管纱线人工肌肉
传统的电化学碳纳米管纱线人工肌肉存在以下局限性:(1)阴阳离子的嵌入、嵌出过程使得驱动应变与扫描电压之间呈现出“双极”效应,这意味着在电化学窗口内,纤维尺寸不是单调性变化,反向离子的嵌入、嵌出抵消了驱动应变,从而降低了人工肌肉的驱动性能;(2)人工肌肉的性能完全依赖于工作电极的电容特性,即随着扫描速率的增加,性能急剧降低。因此,传统的人工肌肉只能产生单向驱动,而且需在极低的扫描速率下工作。
针对以上问题,美国德克萨斯大学达拉斯分校Ray H. Baughman教授联合哈尔滨工业大学冷劲松教授与江苏大学丁建宁教授等人首次发现通过聚电解质功能化的策略,可实现人工肌肉智能材料的“双极”(Bipolar)驱动转变为“单极”(Unipolar)驱动,同时发现了人工肌肉随电容降低,驱动性能增强的反常现象(Scan Rate Enhanced Stroke, SRES),这一重要突破解决了人工肌肉驱动性能的电容依赖性问题,为后续设计具有无毒、低驱动电压的高性能驱动器提供新的理论基础。研究成果以“Unipolar-Stroke, Electroosmotic-Pump Carbon Nanotube Yarn Muscles”为题,在线发表于国际顶级期刊《Science》上。

研究人员通过聚电解质(零点电位移动试剂)功能化的策略,改变人工肌肉的零点电位:(1)实现了单一离子嵌入、嵌出的“单极”效应,解决了“双极”效应反向离子的嵌入、嵌出引起的性能降低问题,提高了做功效率与能量密度等性能;(2)人工肌肉随扫描速率增加,驱动性能增加,实现了SRES效应,解决了传统人工肌肉驱动性能的电容依赖性问题。进一步研究发现,SRES效应是因水合离子在高扫描速率或脉冲频率下可带动周围的水分子,从而增大了离子的有效尺寸,提高人工肌肉性能。
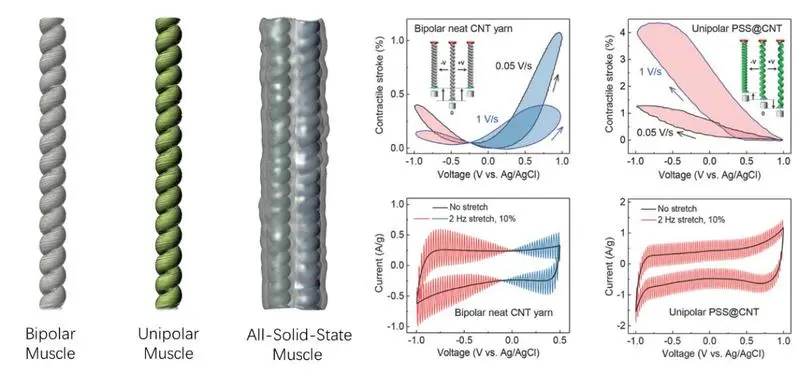
图10. 人工肌肉类型以及“单极”、“双极”驱动特征对比。来源Science
相比于传统人工肌肉,该人工肌肉具有无毒、驱动频率高(高达10 Hz)、驱动电压低(1 V)、高比能量(0.73~3.5 J/g),高驱动应变(3.85~18.6 %)以及高能量密度(高达8.17 W/g)等特性,在空间展开结构、仿生扑翼飞行器、可变形飞行器、水下机器人、柔性机器人、可穿戴外骨骼、医疗机器人等领域具有巨大的应用潜力。
来源:高分子科学前沿


