摘要
口腔医学美学是现代口腔医学的重要组成部分。随着科学技术的发展与学科交叉的推进,机器人技术在口腔医学美学领域的研究日益广泛,临床应用也逐渐增多。上海医疗器械展会Medtec小编转载本文阐述机器人技术在牙体硬组织美学、牙周软组织美学、牙列空间美学、颌面部美学中的研究和应用现状,分析目前存在的问题和未来的发展趋势,为口腔医学美学领域机器人技术的研究和应用提供参考。
口腔医学美学是现代口腔医学的重要分支和组成部分,主要围绕牙体硬组织美学、牙周软组织美学、牙列空间美学、颌面部美学等领域,开展多学科融合的临床诊疗和研究工作 [ 1 ] 。近年,随着科技革命和产业变革的深入发展,学科交叉融合不断推进。医学与工学、理学等不同学科的交叉融合,成为推动临床医学进步的新引擎,也为口腔医学美学的发展带来新机遇。
医用机器人具有鲜明的跨领域和学科交叉特性,发展至今已有近40年的历史。广义上,医用机器人是指用于医疗领域的各类机器人,包括手术机器人、康复机器人、医疗辅助机器人、服务机器人等 [ 2 ] 。狭义上,医用机器人特指微创手术机器人,可辅助医师用更精准和微创的方式进行手术。本文所述的机器人技术,即狭义上的手术机器人技术。1985年,Kwoh等 [ 3 ] 开展首例有记录的机器人辅助手术。1987年,美国批准全球第一个手术机器人——NeuroMate(Sacramento,美国)上市 [ 4 ] 。在口腔医学领域,国外和国内首个口腔手术机器人分别于2017年(Yomi ®,Neocis,美国)和2021年(瑞医博 ®,北京柏惠维康科技股份有限公司)获批上市。此后,凭借微创、准确、重复性好等优势,口腔手术机器人技术进入快速发展阶段 [ 5 , 6 , 7 , 8 ] ,我国口腔手术机器人的研究和应用现总体上处于国际先进水平。
随着计算机软件、硬件以及计算力的进步,机器人技术逐渐融合计算机视觉技术、规划决策系统、大数据统计分析等人工智能技术,已不是单纯的机械装置。在口腔医学美学领域,目前机器人的研究成果日益增多,临床应用也开始起步。口腔医学美学治疗主要包括美学设计、美学表达及美学实现三个环节 [ 9 ] ,现阶段美学设计与美学表达仍主要依赖临床医师的经验和操作,人工智能与机器人技术尚未普及应用。当前机器人的优势主要体现于美学实现环节,即利用机器人辅助精准实现医师制订的治疗方案。本文浅析机器人技术在牙体硬组织美学、牙周软组织美学、牙列空间美学、颌面部美学中的研究和应用现状,探讨目前存在的问题和未来的发展趋势,为口腔医学美学领域机器人技术的研究和应用提供参考。
口腔行业的创新主要来源于材料及技术。材料方面,出于给患者更好的美学体验,新材料不断代替着传统材料,同时新材料也具有着更好的生物兼容性、强度及稳定性。而在技术方面,数字化已不再是选择题,而是必答题。不仅是在治疗过程中,在牙齿植入物的生产 、治疗后的患者情况追踪等各个医疗环节均能见到数字化的身影。上海医疗器械展会Medtec将推出全新消费医疗专场论坛——口腔科专场,本次会议将从口腔科新兴材料、核心部件与技术的应用角度出发,为口腔科设备制造商及上游供应链提供交流的平台。点击预登记即可参会>>>
一、牙体硬组织美学中的机器人技术
牙体硬组织美学重点关注临床冠的形态和颜色。牙体硬组织美学缺陷常用的治疗方式包括漂白、树脂充填直接修复以及贴面或全冠等间接修复,从而恢复牙齿的形态、结构、美观和功能 [ 1 ] 。在牙体硬组织美学领域,随着微创修复理念的发展和技术进步,牙体预备的精度要求逐渐提高。但当前优质医疗资源有限且地域发展不均衡,同时,高水平医师也可能因疲劳等人为因素影响医疗质量。因此,能否利用机器人提高牙体预备的正确度和精密度成为学者关注的焦点。目前口腔手术机器人系统中的机械臂多源自工业用机械臂,体积较大,用于后牙区狭小的操作空间时存在一定的难度和风险。而牙体硬组织美学治疗主要集中于口腔前部,操作空间充足,更有利于机器人发挥高精度的优势。目前,牙体硬组织美学中的机器人技术主要是利用机械磨削或激光消融进行贴面或全冠牙体预备。
机器人牙体预备技术经过从辅助操作到自主操作的发展历程。Ortiz Simon等 [ 10 ] 于2011年报道一种协助口腔医师操控涡轮手机的装置,其可将定位准确度提高53%,但该装置仅发挥辅助定位作用,最终牙体预备过程仍依赖医师手工操作。2015年,Otani等 [ 11 ] 率先开发一种可自动进行贴面牙体预备的机器人,研究者于软件内人工设计预备体形态后,由机械臂夹持高速涡轮手机对树脂牙进行预备。体外研究结果显示,终止线处机器人预备的准确性优于自由手 [ 11 ] ,但利用机器人进行贴面牙体预备的整体准确性尚待进一步提高,且该技术仅能用于体外坚固固定的模型,无法用于存在微动的仿真头模或临床情境。与机械磨削相比,使用激光消融进行牙体预备时产生的噪声、震动和疼痛更少,有望增加治疗的安全性和舒适性 [ 12 ] 。为此,北京大学口腔医学院·口腔医院吕培军教授团队于2014至2016年陆续利用激光机器人进行牙体预备研究 [ 13 , 14 ] ,离体磨牙研究显示,激光机器人牙体预备的尺寸偏差为0.05~0.17 mm、角度偏差约为1.0°、预备时间约为17 min,初步验证了激光机器人体外牙体预备技术的准确性和可行性 [ 14 ] 。然而,利用激光消融形成的预备体表面光洁度有限,可一定程度影响该机器人的临床应用。
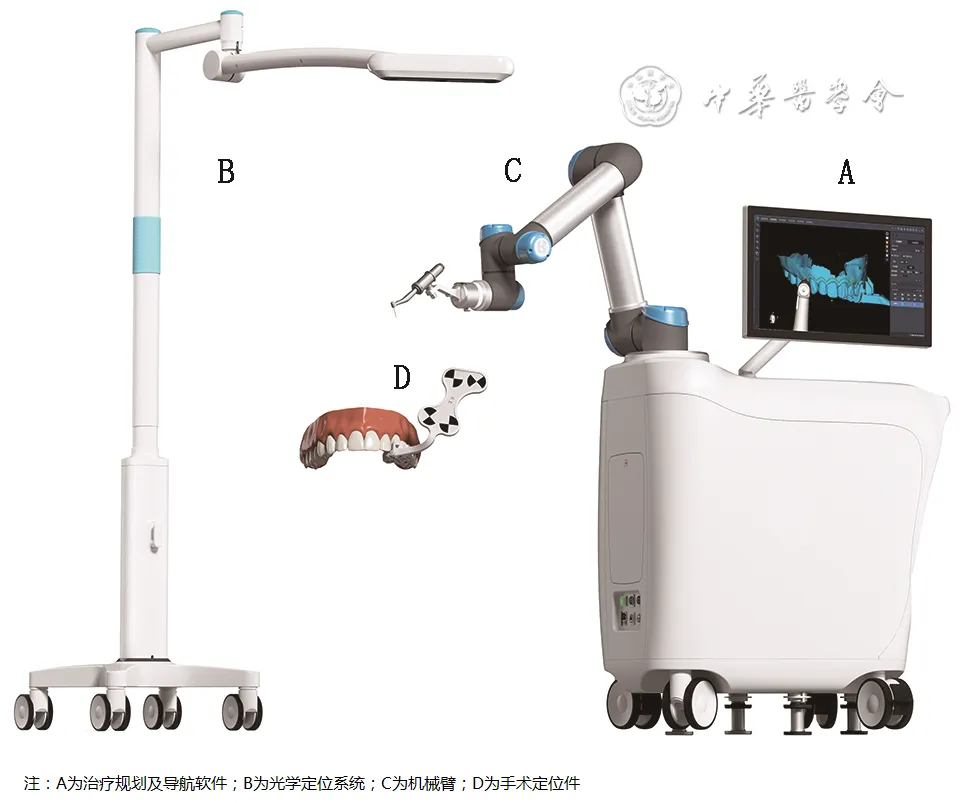
以上机械磨削或激光消融机器人仅限于体外研究,研究发表后数年来,鲜见后续临床研究与应用。究其原因,主要是牙体硬组织美学修复的精度要求高且路径复杂,以往机器人的软硬件条件、路径规划、安全性、操作正确度与精密度、预备效率、预备体光洁度等方面无法全面满足临床需求。为此,笔者团队在现有口腔手术机器人硬件的基础上( 图1 ),探索牙体图像自动分割、牙体预备轨迹规划、预见跟踪控制、多模态信息感知、人机交互等关键技术,旨在将牙体预备规划、导航和操作平台统一至机器人系统,预期将采用计算机视觉导航方式,实时有效探测和精准全面追踪口腔解剖结构,通过高精度轨迹测算、高速随动响应与高安全性控制,提高牙体预备的操作精度,最终服务于牙体硬组织美学缺陷治疗。
二、牙周软组织美学中的机器人技术
牙周软组织美学在狭义上重点关注牙周软组织的形态和颜色,广义上则包括天然牙和种植体周围的软组织美学。对于牙周软组织美学缺陷,治疗方式主要包括洁治、刮治等基础治疗以及软硬组织手术等 [ 1 ] 。与前述牙体硬组织治疗不同,牙周治疗多涉及软组织,对手术的路径规划、灵活控制、力反馈、安全性等要求更高,因此,目前机器人技术在牙周软组织美学中应用的研究较少。2023年起,笔者团队逐步探索将机器人技术应用于牙冠延长术。
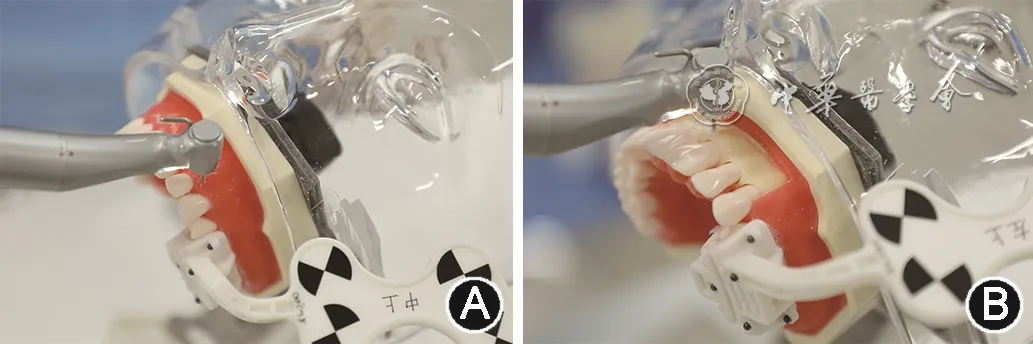
牙冠延长术是解决牙龈暴露过多、临床冠过短等牙周软组织美学缺陷的重要手段,术后美学效果受多种因素影响,术中确立牙龈和牙槽骨良好的位置与形态至关重要 [ 15 ] 。为提高手术正确度和精密度,减少人为因素的不利影响,笔者团队开发了用于牙冠延长术的机器人技术,并于体外验证其安全性和可行性。将研究模型口内扫描数据与锥形束CT数据融合后,分别于口内扫描数据上规划牙龈切除轨迹、于锥形束CT数据上规划牙槽骨切除轨迹,通过光学定位系统实时追踪牙颌位置,由机器人夹持手术器械自主磨削牙龈和牙槽骨的边缘位置及形态( 图2 )。该机器人进行牙冠延长术的误差为0.2~0.3 mm,精度可基本满足临床要求,但略低于龈骨双重导板辅助的牙冠延长术(误差为0.1~0.2 mm) [ 16 ] 。
图2 手术机器人进行体外模型的牙冠延长手术 A:牙龈切除术;B:牙槽骨切除术
由于牙周软组织美学的治疗精度要求高、动作路径和柔顺控制更复杂,未来需要从数据处理、路径规划及精准执行等方面对机器人进行优化,并利用机器学习等算法实现牙周治疗的人工智能设计,待安全性、有效性、精确性等方面获得全面论证后方可用于临床实践。
三、牙列空间美学中的机器人技术
牙列空间美学是指牙列形态、排列和完整性符合美学要求。牙列空间美学缺陷主要包括牙齿缺失导致的牙列缺损和牙列缺失,以及牙齿位置和排列异常导致的错𬌗畸形,治疗方案包括固定修复、活动修复、种植修复、固定矫治、隐形矫治等 [ 1 ] 。目前,机器人技术在牙列空间美学领域的应用,主要是牙齿缺失种植修复中的种植体植入术。
种植修复中理想的种植体三维位置至关重要,机器人凭借其稳定的优势,可获得较准确的种植体植入位置 [ 17 , 18 ] 。2001年,Boesecke等 [ 19 ] 率先提出机器人引导的种植体植入系统,由医师控制机械臂植入种植体,手术精度较低,种植体位置偏差为1~2 mm。经过20余年的发展,目前国内外已有多款口腔种植机器人陆续上市,关于种植机器人的体外实验、体内试验和临床应用日渐增多。由于种植体植入术仅涉及单一维度的手术路径,相比牙体硬组织和牙周软组织美学处理,种植手术的路径规划更简捷。因此,种植手术机器人是目前相对成熟的口腔手术机器人。临床初步研究显示,机器人种植手术的种植体颈部和根尖偏差以及角度偏差分别约为0.6和0.7 mm以及1.6° [ 20 ] ,可基本满足临床需求。笔者团队较早开展机器人种植手术的研究、应用和推广,结果显示,机器人可提高种植修复的精度,改善治疗效果( 图3 ),且医疗机构、医师、患者和研究者对机器人的关注度和接受度逐渐增加。
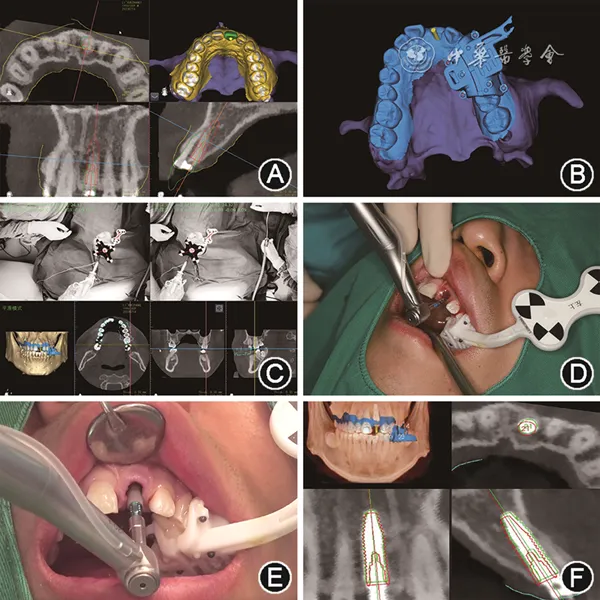
图3 机器人辅助美学区即刻种植过程 A:设计种植体位置(左上:横断面;右上:三维重建;左下:冠状面;右下:矢状面;红色线条为设计的种植体位置,绿色线条为天然牙位置);B:口内扫描数据与锥形束CT数据配准进行患者位置注册;C:种植手机位置注册(上图:双目视觉定位系统的两组实时影像,下图从左至右分别为患者CT三维重建图像、横断面、冠状面和矢状面);D:种植窝洞预备;E:种植体植入;F:术后效果评价(左上:三维重建;右上:横断面;左下:冠状面;右下:矢状面;红色线条为设计的种植体位置,绿色线条为术后实际的种植体位置)
美学区种植手术中,种植位点位于拔牙窝内、因骨缺损形成的斜形骨面上或颊舌侧骨密度存在较大差异的部位时,如何将种植体精确植入理想的三维位置,临床操作存在一定挑战。机器人具有操作稳定可靠的优势,有望减少术中操作误差,提高美学区种植手术的最终精度。然而,此类病例的机器人种植手术仍需选择侧切力较大的锋利钻针,必要时应将种植体位置向骨密度较高侧进行调整,补偿术中种植体向骨密度较低侧的偏移,避免侧向力不均带来的精度误差。未来,利用大数据的优势,针对不同骨缺损程度、不同骨密度分布的特点,可对备洞和植入策略进行更详尽、精准和个性化的人工智能设计,逐步提高美学区种植手术的精度。
颌面部美学由颌面部骨组织和软组织共同构建。颌面部美学缺陷包括骨组织美学缺陷、软组织美学缺陷和微笑美学缺陷,治疗方案主要包括正颌手术、正畸治疗、整形外科、注射美容、激光美容等 [ 1 ] 。目前,机器人技术在颌面部美学领域的研究和应用主要见于正颌手术中利用机械磨削和激光消融辅助截骨。
临床可通过影像数据进行手术规划,再由机器人对颅骨进行自动截骨,并辅助医师定位骨块。目前,利用机械磨削进行截骨的机器人主要见于体外研究,截骨的距离和方向均可达到较高的精度 [ 21 , 22 , 23 ] 。与机械磨削相比,激光消融可更好地保留骨组织结构,减少疼痛与机械损伤,目前,利用机器人引导激光消融进行正颌手术已逐渐于临床开展,其截骨平均偏差为0.8 mm [ 24 ] ,最大偏差为1.5 mm [ 25 ] 。以上研究证实,机器人辅助正颌手术的精度已可初步满足临床需求,有望解决术前设计方案无法在术中准确实施的问题,提高手术的可预测性。然而,在颌面部美学领域,机器人的研究和应用主要集中于硬组织,在软组织美学和微笑美学方面鲜见相关报道。未来需从机器人手术的安全性和有效性方面开展深入研究,并逐步拓宽应用范围,开发软硬组织兼顾的全流程、全场景手术机器人。
现代口腔医学美学正在进入智能技术辅助的多学科融合时代,机器人以其精准、稳定、微创等诸多优点弥补了医师手工操作的局限性,为口腔医学美学缺陷的治疗提供更多便利。上海医疗器械展会Medtec相信,随着通信技术的发展,医师可远程控制机器人系统进行口腔手术,通过跨地区的医疗交流与合作,推动医疗技术普及,实现医疗质量同质化,有效提高整体医疗水平。
在口腔医学美学领域,为给患者提供更优质、高效、舒适的诊疗体验,未来机器人技术可从以下方向进行优化:①智能化,结合专家经验和人工智能技术,提供更精准和个性化的诊断与治疗设计,优化操作路径,提升治疗精度。②自动化,在图像处理、路径规划、流程推进等过程中,减少对医师或工程师指令的依赖,实现自适应、可预测的自动控制。③小型化,缩小体积、优化结构、提高灵活性,以适合在口腔狭小空间内进行精准治疗。④敏捷性,对临床环境及时做出响应,敏捷、流畅地控制机器人的自身动作,改善患者舒适度和治疗安全性。⑤降成本,优化机器人产学研用成本,简化术前准备工作,实现提质控费增效。
作者:刘晓强 谭建国
通信作者:谭建国
作者单位:北京大学口腔医学院·口腔医院修复科 国家口腔医学中心 国家口腔疾病临床医学研究中心 口腔生物材料和数字诊疗装备国家工程研究中心 口腔数字医学北京市重点实验室
引用本文:刘晓强, 谭建国. 口腔医学美学领域的机器人技术[J]. 中华口腔医学杂志, 2024, 59(6): 546-550. DOI: 10.3760/cma.j.cn112144-20240208-00070.
文章来源:中华口腔医学杂志