






2024有源医疗器械创新论坛一文熟悉人形机器人常用的四类感知传感器:视觉、力/力矩、触觉、IMU
2024-10-31
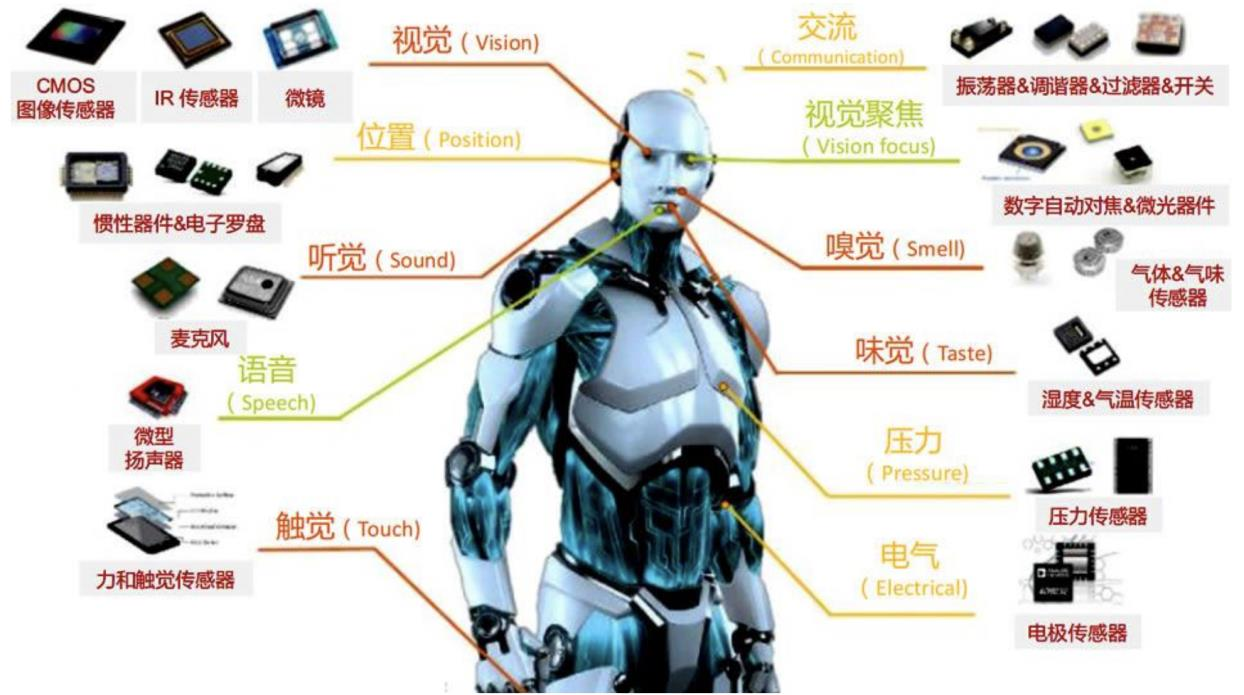
感知传感器是人形机器人迈向智能化的基础。
2024有源医疗器械创新论坛了解到,如同智能驾驶需要感知-决策-执行三部曲,人形机器人也需要这样的流程:通过传感器感知关键状态,经过微处理器、计算机或神经网络处理分析后,交由机械臂、双足或轮子等移动装置或加热/制冷设备等非移动装置执行相关工作。
传感器是能感受被测量并按照一定的规律转换成可用输出信号的器件或装置,一般由敏感元件、微处理器、信号转换电路三部分组成。其中敏感元件是指直接感受测量信息,并输出与被测量信息成确定关系的某一物理量的元件;微处理器是指以敏感元件的输出为输入,把输入数据转化为电路信息的元件;信号转换电路再将电路参数转换成便于测量的电信号,实现信号的获取与输出。
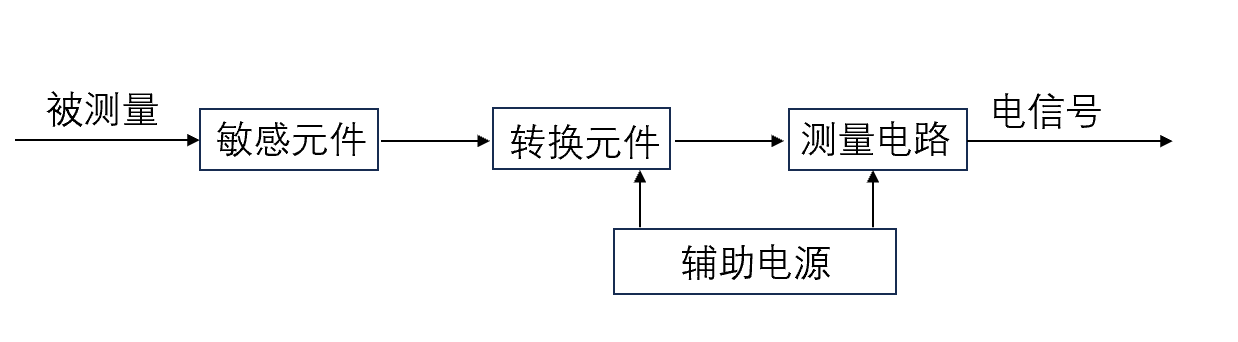
传感器通过各种元件测量外部信息,来源《面向机器人的多维力/力矩传感器综述》钟晓玲等
2024有源医疗器械创新论坛表明,感知传感器作为人形机器人感知系统的核心组件,作为人形机器人实现检测和控制的首要环节,是机器人系统获取外界状态和自身状态的重要途径,也是机器人迈向自主化、智能化的基础。本文主要探讨人形机器人的视觉传感器、力/力矩传感器、触觉传感器、IMU惯性传感器。
一、视觉传感器
人所获得外界信息的80%是靠视觉得到的,机器也类似。机器视觉本质上是为机器植入“眼睛”,利用环境和物体对光的反射来获取和感知信息。
视觉传感器是一种使用光电传感器件来获取物体图像的设备,它能够将物体图像转化为数字信号,并且对图像进行处理和分析。视觉传感器的工作过程包含检测、分析、描绘和识别四部分:视觉检测主要利用图像信号输入设备,将视觉信息转换成电信号;视觉图像分析是把摄取到的所有信号去掉杂波及无价值像素,重新把有价值的像素按线段或区域等排列成有像素集合;视觉描绘和识别是从物体图像中提取特征,给予标志。
根据图像信息获取维度、处理数据类型的不同,机器视觉可划分为 2D 视觉与 3D 视觉。2D 视觉通过工业相机来获取平面图片,主要基于物体的一个平面特征进行后续分析,无法获取物体的空间坐标信息。3D 视觉能够采集视野内空间每个点位的三维坐标信息,通过算法获取三维立体成像,并根据这些数据信息分析得出有关目标对象在空间中的位置、形状、体积、平面度等信息,以达到检测、引导、测量、定位等功能。
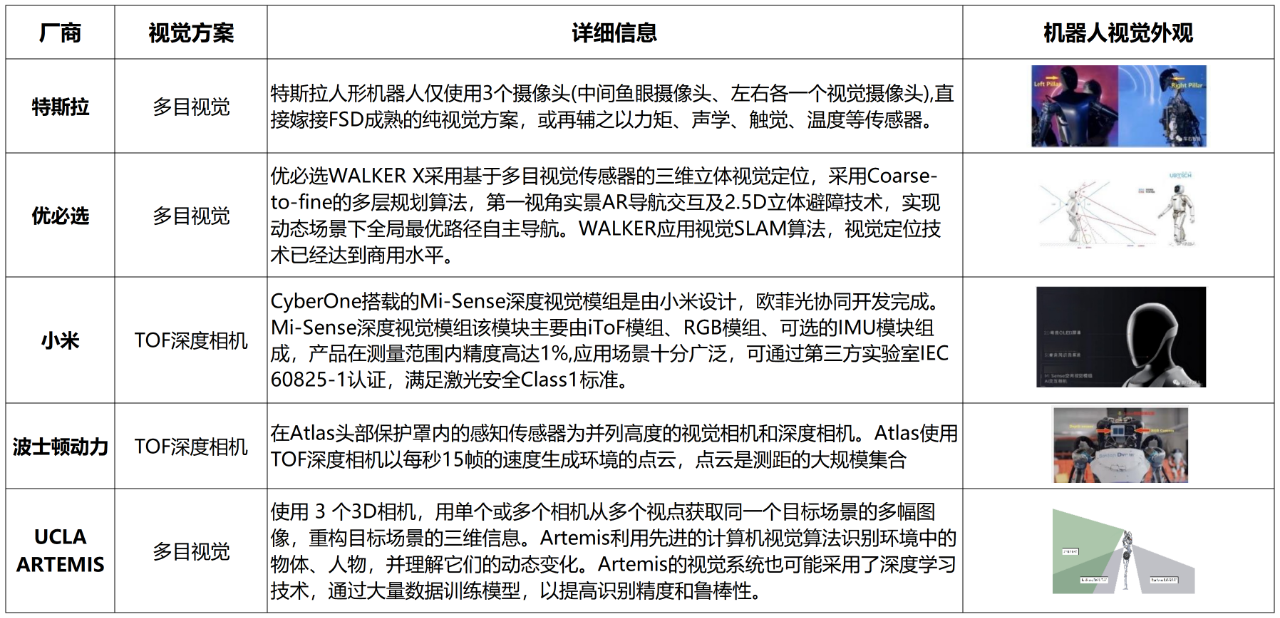
随着智能制造的不断深入,面对复杂的物件辨识和尺寸量度任务,以及人机互动所需要的复杂互动,2D 视觉在精度和距离测量方面均出现部分技术局限,市场对 3D 视觉的需求开始与日俱增。在人形机器人应用领域,3D 视觉传感器可以帮助机器人高效完成人脸识别、距离感知、避障、导航等功能,使其更加智能化。
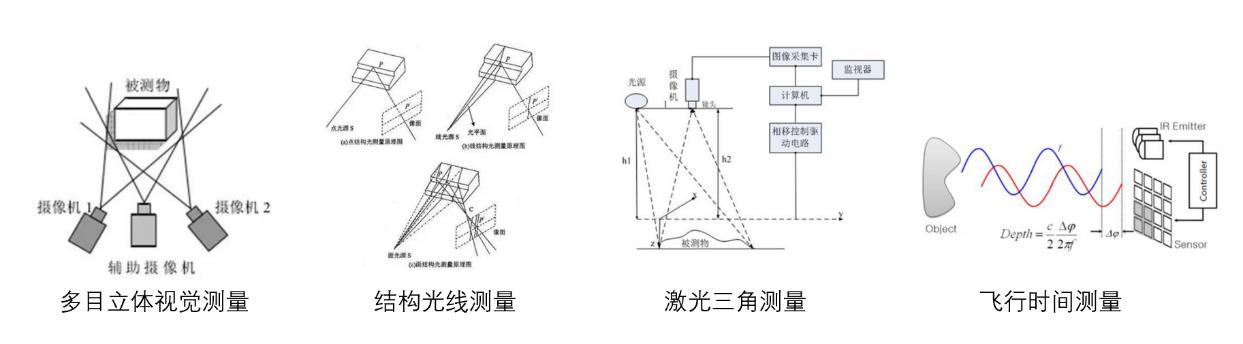
测量方法图示,来源:传感器技术公众号
此外,3D视觉传感器相关企业有英飞凌、奥比中光、瑞芯微、 华捷艾米等。
有源医疗设备展Medtec现场将设四大专区,囊括电子光学、AI、IVD诊断及影像、检测、临床、法规、研发设计& 大动物实验专区等展品,点击此处报名参展>>>
二、力/力矩传感器
力/力矩传感器是一种能感知力、力矩并转换成可用输出信号的传感器,主要包括本体单元和应变/形变检测系统两部分。力/力矩传感器的核心原理是将力作用下的形变转换成电信号,当有力/力矩作用时,力/力矩施加于传感器本体单元上,并引起本体单元的应变或形变,检测系统可感知本体的应变或形变,通过电路将其转化为相应电压,通过测量电压值来表征力/力矩大小,并转换成可用输出信号,实现力/力矩的测量。
根据其测量原理不同,力/力矩传感器可以分为光电式、应变式、电容式、压电式等多种类型。这其中,应变式力/力矩传感器是当前技术最为成熟、应用最广泛的传感器类型。压电、电容和光电等测量原理的力传感器有一定的理论研究和实验基础,但下游尚未得到广泛应用。
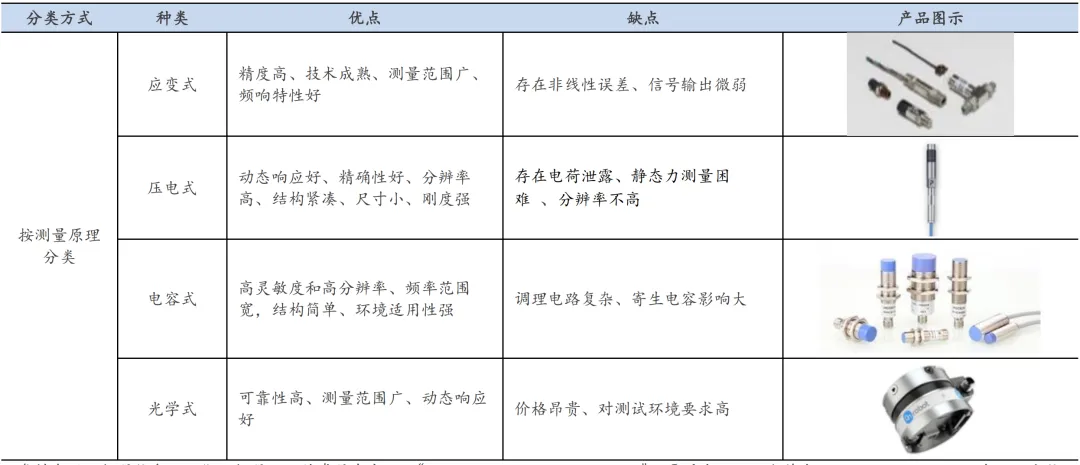
来源:仪器信息网、化工仪器网、传感器专家网,《Handbook of Modern Sensors》、霍盾官网、汉矢德官网、TE Connectivity 官网、安信证券
根据特斯拉 AI DAY,预计特斯拉机器人关节处使用单维力传感器,执行器末端使用六维力传感器。根据测量维度,力传感器可以分为一维、多维(三维、六维)力传感器。一维力传感器仅检测一个方向的作用力或力矩,工业中应用广泛,价格也较为便宜(大多为数百元)。多维力传感器仅包括三维力和六维力传感器,均需要标定 XYZ 坐标轴,区别在于应变片的数量及解耦算法。六维力传感器是最高端的力矩传感器,同时测量 XYZ 轴向力和环绕轴的力矩,内部的算法可以解耦各个方向的力和力矩的干扰,应用于高端机器人和精密设备中,价格也十分昂贵(大多在数千元至上万元)。
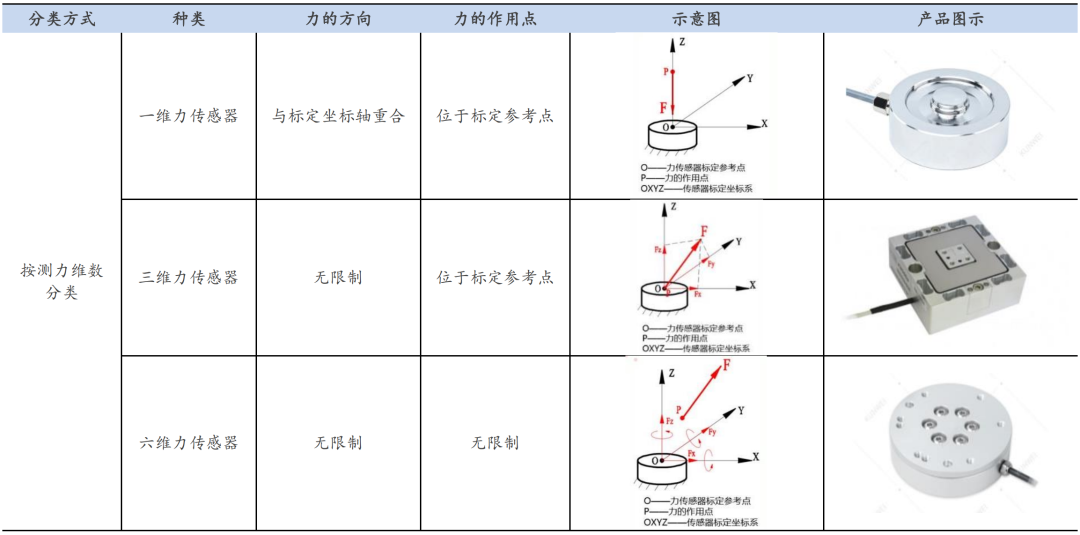 力传感器按测力维数分类,来源:坤维科技
力传感器按测力维数分类,来源:坤维科技
如下图所示,六维力传感器共由四部分机械元件组成:十字梁型弹性体(简称弹性体)、底盘、基座和顶盖。弹性体结构的主梁的正反面或侧面贴有应变片,当外力/力矩作用于传感器上时,弹性体变形,使粘贴在弹性体上的应变片发生形变,然后通过应变电桥转换成电桥的电压输出出来。应变片和弹性体是六维力传感器核心元件。
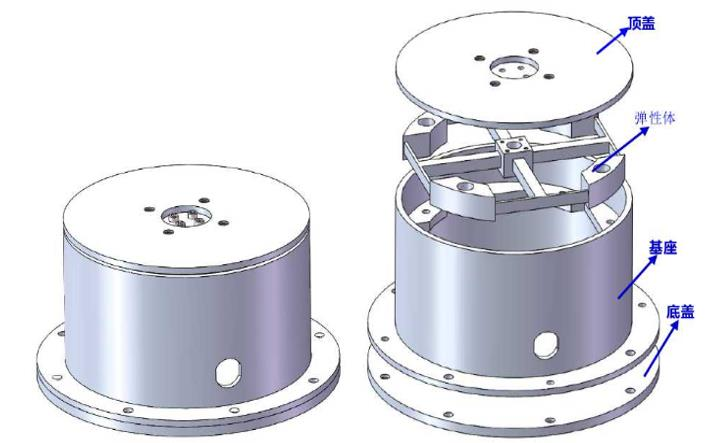
六维力矩传感器主要结构,来源:付立悦《多维力传感器的静动态性能研究》
六维力传感器技术壁垒
2024有源医疗器械创新论坛发现,结构设计、标定与检测、算法设计是六维力/力矩传感器领域的三大壁垒。
-
结构设计:兼顾高灵敏度、高动态性能和低维间耦合的原理和结构创新是当前电阻应变式多维力传感器研制中面临的一大挑战。高灵敏度要求应变测量区域的刚度尽可能小而易于产生应变,而高动态性能则通常要求整个结构的刚度尽可能大。此外,结构上的连续性导致弹性体各区域之间在受外载荷时不可避免地会产生耦合变形(应变),进而可能导致耦合输出。因此,对于六维力/力矩传感器而言,结构设计至关重要。
-
标定与检测:标定指通过对样本空间中的样本点进行精确加载,建立传感器信号与力和力矩的映射关系,获得解耦算法的数学模型和参数。六维力/力矩传感器需要对六维样本空间进行标定,难度远高于一维传感器。主要体现在样本空间更大、标定设备更复杂、数学模型理论基础更深三个方面。
-
算法设计:六维力传感器的内部算法,会解耦各方向力和力矩间的干扰,使力的测量更为精准。高精准度的军用六维力传感器,可以确保在六维度联合承载的情况下,测量值偏差在量程的 0.3%FS 以内。
目前六维力矩传感器成本高的主要说法有两种:
说法一:成本高主要在于应变片和人工成本。
-
应变片:每个六维力矩传感器通常需要使用约30-40个应变片,在软硬件方面都存在诸多技术难点,导致应变片成本较高。
-
人工成本:在目前国内外技术条件下,六维力矩传感器生产的贴片、温度补偿、测试等核心环节仍然须由人工完成,生产过程全自动化存在困难,人工成本较高。
说法二:成本高主要是因为坐标轴标定设备和解耦算法研发的高额投入。
六维力传感器存在多种检测原理,硅基/金属箔等电阻应变片具有更好的性能优势,原理是应变片受力后产生的微米级别的变形导致电阻和电压的变化,金属箔应变片价格较高,目前为 10 元人民币左右,而 MEMS 工艺下的硅基应变片可以降低至 1 元以下,因此应变片成本并不是六维力传感器成本高昂的最主要原因。其高昂的成本主要来源于坐标轴标定设备和解耦算法研发的投入,多维力矩传感器需要应对因结构加工和工艺偏差引起的各维度间相互干扰的问题,以及动态和静态标定问题,同时还需要解决矢量运算中的解耦算法和电路实现等问题,此外还要确保产品的一致性,因此在未大规模放量的情况下成本依然较为高昂,即使国内厂商具有显著的成本优势,也需要上千元的平均成本。
三、触觉传感器
根据Tesla Bot Update 视频,一代机器人灵巧手具有“自适应性(Adaptive grasp)”和“非反向驱动能力(Non-backdrivable fingers)”,可以做到能做到收拾杯盘等复杂活动、分拣乐高等;二代机器人灵巧手的仍保持11个自由度,但是运动的速度和抓取性能大幅提升,指尖中阵列触觉传感器的使用是重要增量,可以做到精准力控并双指捏起鸡蛋。
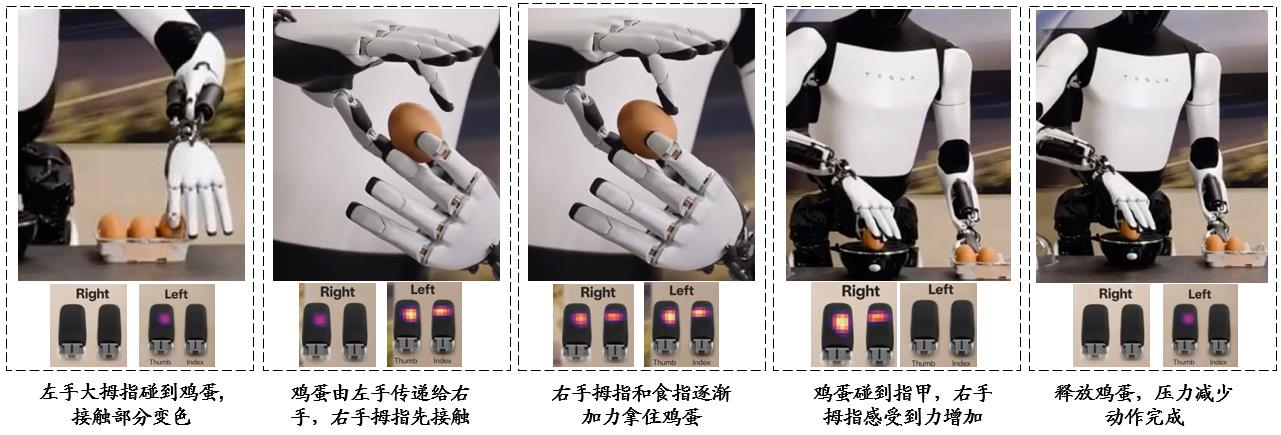
触觉传感器,是Optimus Gen 2 精准力控的核心器件,它是人形机器人仅次于视觉的重要信息源。与视觉不同,触觉本身有很强的敏感能力,可直接测量对象和环境的多种性质特征,因此触觉不仅仅是视觉的一种补充,触觉的主要任务是为获取对象与环境信息和为完成某种作业任务而对机器人与对象、环境相互作用时的一系列物理特征量进行检测或感知。
广义的触觉包括触觉、压觉、力觉、滑觉、冷热觉等,它能感知机器人与环境的交互情况,以及所接触目标的各种物理属性,如位置、形状、柔软度、文理、颜色、刚度等。触觉传感器本质上是将接触面形状、压力、摩擦力、温度等信息进行感知识别和转换的传感器,其组成部分包括电极、敏感材料和导电材料等。按照敏感元件原理,触觉传感器可分为压电式、压阻式、电容式、摩擦电式、电感式、光纤式等,其中压电式、压阻式、电容式、摩擦电触觉传感器应用较为广泛。
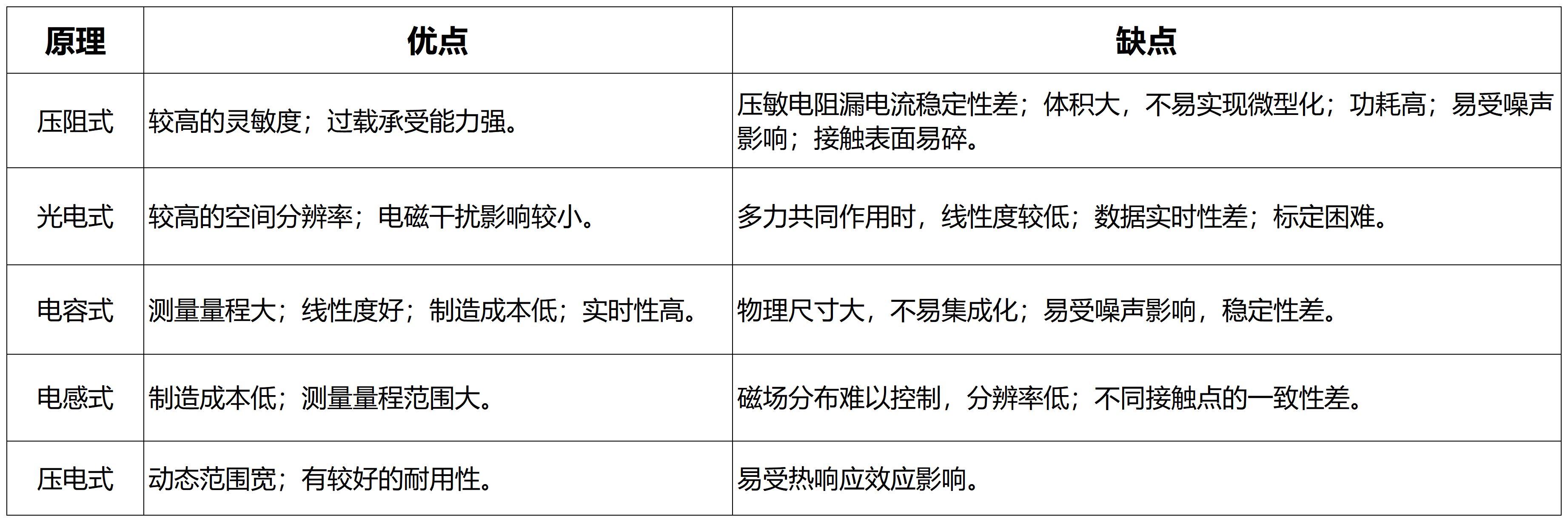
五类不同原理的触觉传感器的对比分析
本节主要探讨的是当下触觉传感器两种主要的技术路线:MEMS、柔性触觉传感器。
1、MEMS压力阵列传感器:
1)区分几个概念
MEMS(Micro-Electro-Mechanical System)是一个广泛的技术领域,是一种微型而精密的机械系统,它将微型机构、微型传感器、微型执行器以及信号处理和控制电路等集成于一块或多块芯片上,产品尺寸一般都在 3mm×3mm×1.5mm。MEMS技术结合了微电子技术和微机械加工技术,具有体积小、功耗低、集成度高、成本低和效能高等特点。
MEMS传感器是采用微电子和微机械加工技术制造出来的新型传感器,是MEMS技术中的一种具体应用,专门用于感知和测量各种物理量。MEMS传感器能够感知并测量各种物理量,如温度、湿度、光照强度、压力、加速度等,并将这些物理量转化为电信号进行处理。与传统的传感器相比,MEMS传感器具有体积小、重量轻、成本低、功耗低、可靠性高、易于集成和实现智能化等优点。
MEMS压力阵列传感器则是MEMS传感器的一个子类,专注于压力测量,并具有阵列式结构。与普通MEMS压力传感器相比,MEMS压力阵列传感器通常包含多个压力传感单元,这些单元以阵列的形式排列,能够同时测量多个点的压力变化。这种设计使得MEMS压力阵列传感器在需要高空间分辨率和压力分布测量的应用场景中具有显著优势。
2)基于MEMS技术的优势,大部分常用的触觉传感器或多或少地应用MEMS技术。前述五类不同的触觉传感器中,压阻式触觉传感器为目前的主流选择,其灵敏度高、分辨率高、技术相对成熟且成本较低,其中MEMS 压阻式传感器为主要的应用趋势。与传统的传感器相比,MEMS传感器具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点。同时,微米量级的特征尺寸使得它可以完成某些传统机械传感器所不能实现的功能。
2、柔性触觉传感器(电子皮肤):
柔性触觉传感器是利用柔性材料的物理特性,将外部的力学量转换为电信息,从而实现对触觉感知的传感器产品。柔性触觉传感器又称为“电子皮肤”,能够实现与环境接触力、温度、湿度、震动、材质、软硬等特性的检测,是机器人直接感知环境作用的重要传感器。传统的触觉传感器以各种刚性材料为敏感元件,存在笨重和硬脆的缺点;柔性触觉传感器则具备类似于人类皮肤的柔韧性,可以适应任意载体形状,更利于测量物体表面受力信息、感知目标物体性质特征,具有研发和产业化价值,目前正处于研发和小批量应用阶段。
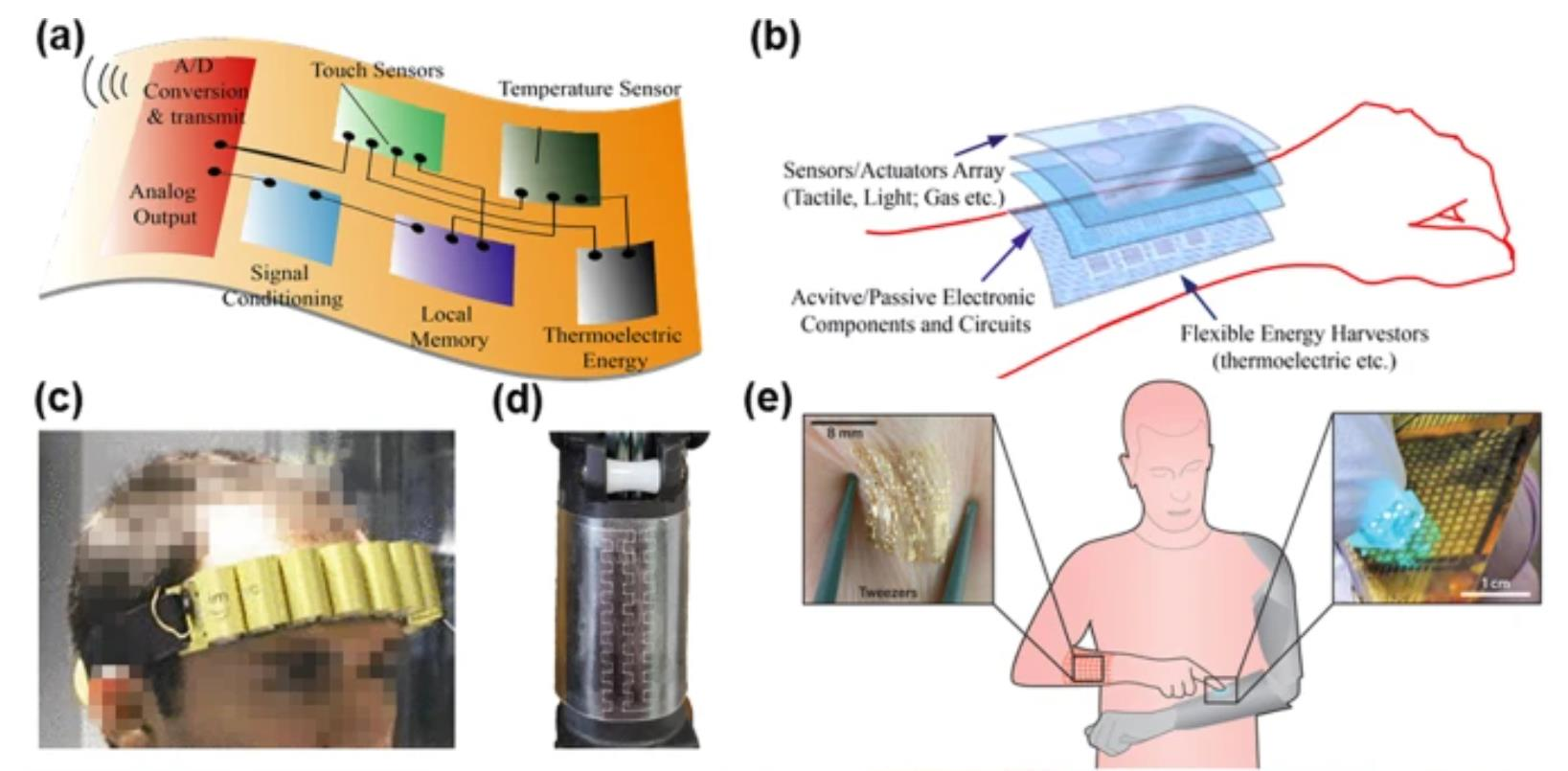
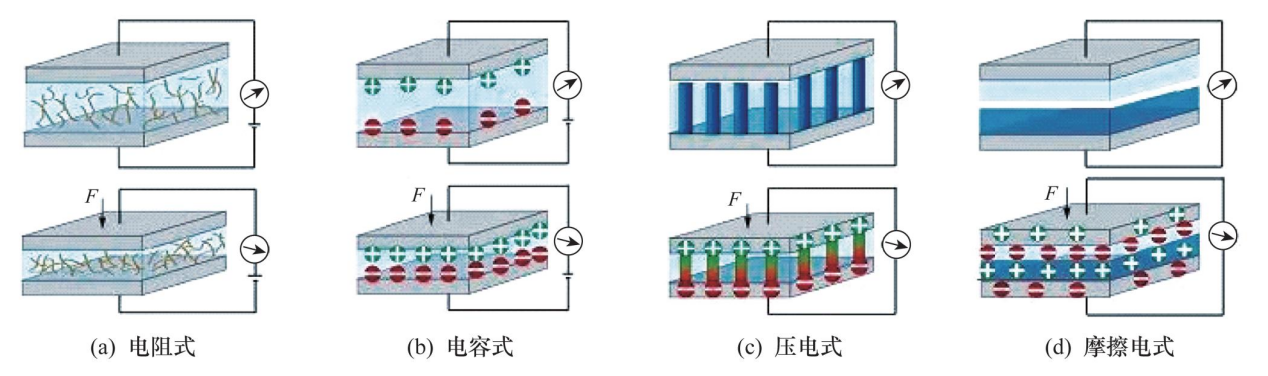
电子皮肤的四种转换机制,来源:宋爱国《机器人触觉传感器发展概述》
柔性压阻式传感器以器件结构简单、灵敏度高、响应快、制造成本低、稳定性好等优点被认为是下一代柔性压力传感器的理想选择。劣势是体积大,不易实现微型化;功耗高,接触表面易碎;易受噪声影响。
柔性触觉传感器主要由基底材料、电极材料、功能层材料构成。基底材料是柔性触觉传感器的基础,是决定传感器弹性形变性能的关键因素。电极材料主要用于传输电信号。功能层材料则是传感器的核心部分,能够将外部的力、温度、湿度等物理量转化为电信号。
-
基底材料:决定传感器弹性性能的关键因素。基底材料起着支撑和保护传感器的作用,要求它具有良好的柔韧性、耐腐蚀性、绝缘性以及温度稳定性等。常用的柔性基底材料有 PET、PI、PDMS、Ecoflex、NR、TPU 等。
-
电极材料:电信号传输。传统的电极一般为金属材料,其本身不具有柔性,多采用减薄金属膜层厚度或设计特殊结构等方法赋予其柔性,这将极大地提高成本且制备工艺复杂。目前,液态金属和导电水凝胶的发展为其提供了新思路。
-
功能层材料:柔性触觉传感器的核心部分。将外部的力、温度、湿度等物理量转化为电信号。具有优异力电特性的功能层材料是决定柔性触觉传感器性能的关键,多采用金属基材料、碳基材料及导电橡胶等。
柔性触觉传感器高端产能被外国占据,市场格局较为集中。根据QYReaearch数据,全球柔性触觉传感器市场主要被海外企业占据,全球排名TOP5的厂商主要包括Novasentis、Tekscan、Japan Display Inc. (JDI)、Baumer、Fraba,合计占有大约57.1%的市场份额;国内企业主要包括钛深科技、柯力传感、汉威科技等。
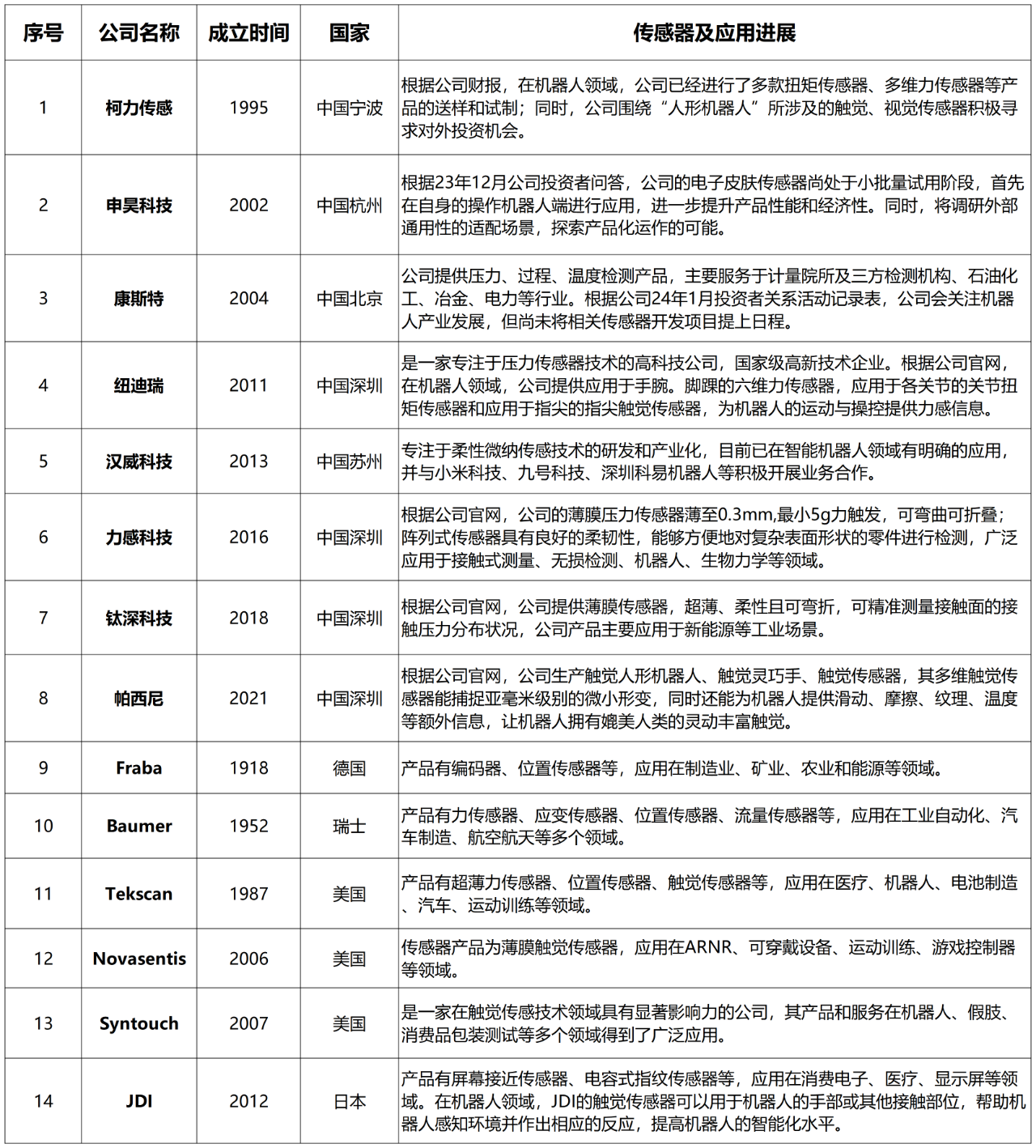
全球触觉传感器代表企业产品及应用,来源公开资料整理
四、IMU惯性传感器
惯性传感器作为机器人的位觉感受器,是人形机器人姿态控制的核心。
惯性传感器是一种用于测量物体的加速度、角速度和倾斜角度等参数的电子传感器,可为机器人提供运动感知和控制能力。根据被测物理量,惯性传感器可以分为加速度传感器(加速计)和角速度传感器(陀螺仪)。另外,也有一些传感器将加速度计和陀螺仪结合在一起,称为惯性测量单元(Inertial Measurement Unit,简称 IMU)。
具体而言IMU是一种测量物体三轴角速度和加速度的设备,通常包括三个单轴的加速度计和三个单轴的陀螺仪,有时还包括磁力计。狭义上,一个 IMU 内在正交的三轴上安装陀螺仪和加速度计,共 6 个自由度,来测量物体在三维空间的角速度和加速度,就是“6 轴 IMU”;广义上,IMU 可在加速度计和陀螺仪的基础上加入磁力计,形成了“9轴 IMU”。通过这种方式,9 轴 IMU 能够提供更全面的运动信息,尤其是在需要确定物体在三维空间中的方向时。
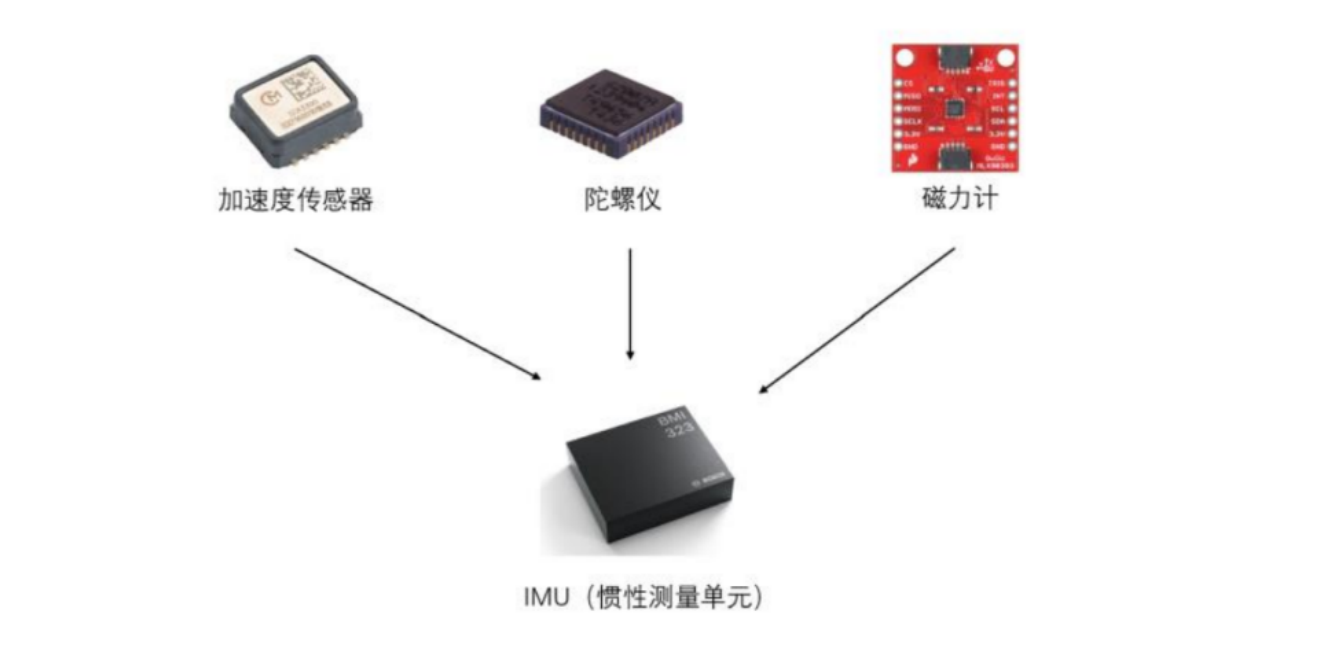 IMU的组成,来源:深迪,村田制作所,道合顺芯闻
IMU的组成,来源:深迪,村田制作所,道合顺芯闻
IMU取代独立MEMS加速计和陀螺仪大势所趋,独立的MEMS加速度计和陀螺仪越来越多地被MEMS IMU所取代。
IMU 在人形机器人领域应用广泛,特别是在姿势跟踪、运动控制和导航方面。通过测量机器人加速度与角速度,帮助跟踪机器人姿势和运动状态;提供实时运动数据并分析,实现机器人运动轨迹、速度精确控制;检测机器人偏移与倾斜,进行实时姿态稳定和调整。在结合算法后,IMU 提供的机器人运动信息,可用于估计机器人的位置,并根据机器人的运动轨迹构建环境地图。帮助机器人进行环境感知并避开障碍物,规划安全路径。同时实现路径规划、自主探索等智能导航功能。
IMU产品生产工艺难度大,准入门槛高,市场份额分布相对集中,国际厂商占据垄断地位,主要有BOSCH、ST、TDK等企业。国内主要有矽睿科技、深迪半导体、士兰微、明皜传感、敏芯股份等企业,市场份额比较小。
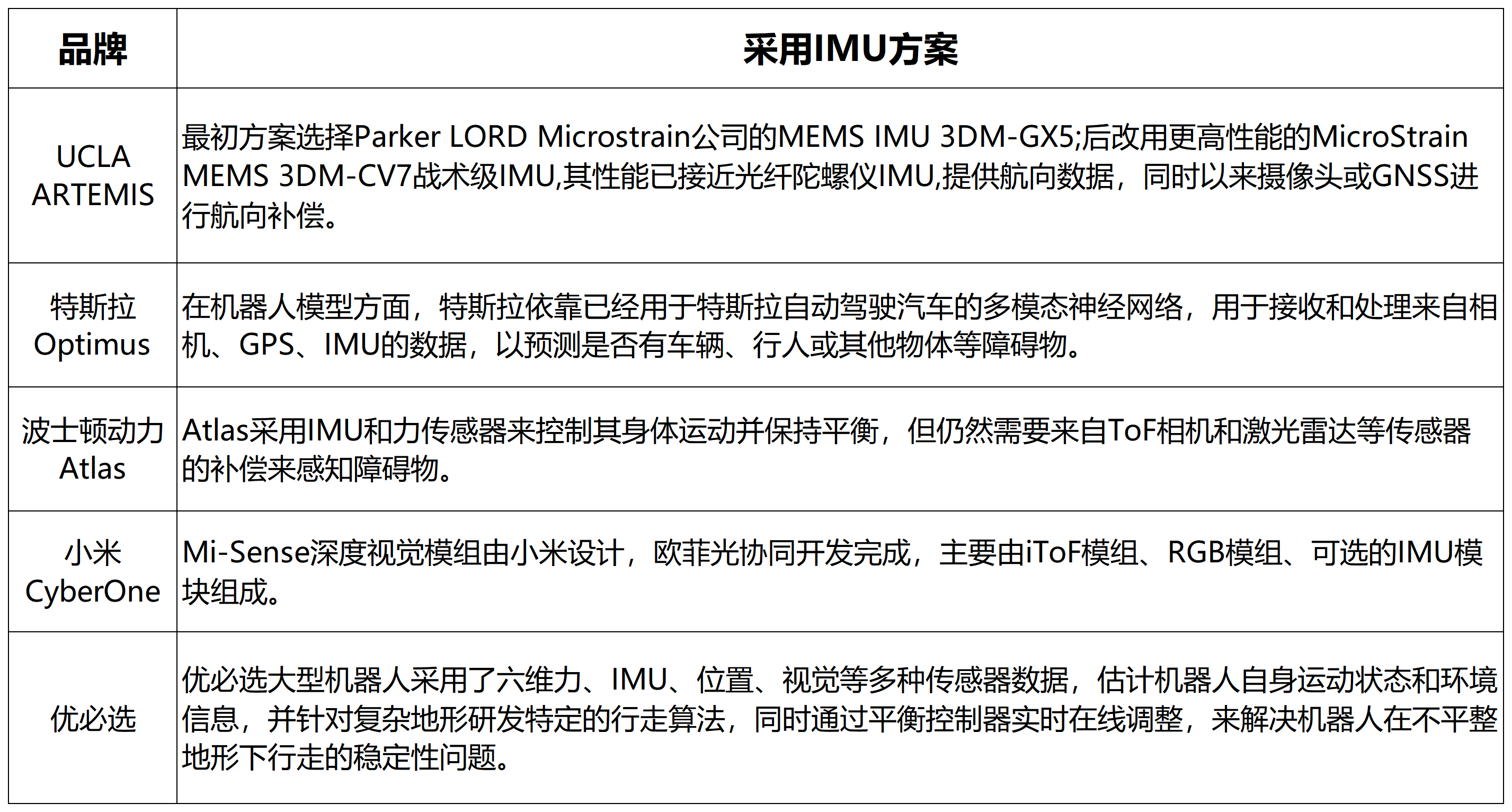 典型人形机器人厂商IMU方案,来源公开资料整理
典型人形机器人厂商IMU方案,来源公开资料整理
小结
人形机器人感知传感器作为机器人感知系统的核心组件,是实现机器人智能感知和自主操作的关键。随着技术的不断发展,各类传感器在性能、成本、应用等方面都将不断取得突破。未来,人形机器人将在更多领域发挥重要作用,为人类的生产和生活带来更多便利和惊喜。
文章来源:


