根据2022年6月发布的一份市场报告,脊柱手术机器人市场到2022年价值为3.312亿美元,预计到2028年将达到9.888亿美元。
-
1. 未来六年内,市场预计将以20% 的复合年增长率增长。
-
2. 报告称,北美以68% 的比例占据了机器人脊柱市场的最大份额。亚太地区紧随其后,市场份额约为18%。
-
3. 报告称,机器人脊柱医疗技术行业的主要参与者包括 Mazor Robotics、Globus Medical、Medtech SA 和 Tinavi Medical Technologies(指中国的天智航)。
Medtec China 了解到由于计算机、导航和机器人技术的创新,计算机辅助机器人系统已被用于各种骨科手术,包括关节成形术、脊柱手术、骨肿瘤手术、关节镜检查、骨折复位、创伤手术的骨折固定。以骨折手术为例,在微创骨折复位过程中,外科医生需要在术中透视的持续监测下手动操作骨折的骨头。受限于C型臂的视野,骨折复位的效果主要取决于外科医生的技术和经验。骨折部位的不正确定位和对齐以及旋转不良常常导致术后并发症,例如畸形愈合和骨不连。持续辐射是目前骨科创伤手术的一个前提条件,但对医务人员会产生累计伤害。目前主要面临的挑战包括:1)骨折的不可见性和复杂性;2)骨折复位精度更高,术后功能更佳;3)适当的机器人自由度(DOF)提供足够的工作空间;4)下肢骨折复位时需要足够的机器人输出力。
为了实现提高精度、输出力和扩展工作空间的目的,各种类型的机器人在过去几十年中得到了发展,包括串行、并行和混合机器人机构。对于骨折手术,另一个问题是骨折的不可见性。因此,机器人在手术过程中需要知道或“看到”骨折的位置,而这在传统手术中必须通过X射线来实现。计算机辅助导航系统可用作手术机器人的“眼睛”。在“导航系统”部分介绍了用作手术骨折复位的独立系统。在“机器人系统”部分,介绍了当前不同类型的机器人,包括:1)串行机器人机构,如单侧外固定器、牵引装置和串行机械臂;2)并联机器人机构,如环形外固定架、牵引装置、并联机器人机械手;3)混合机器人。在“结论”部分,总结了未来骨科手术发展方向和潜在应用。
1 国内外研究现状
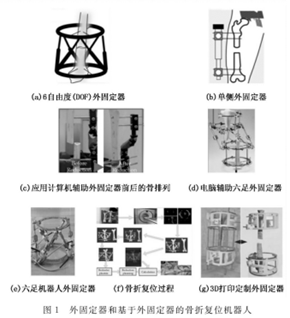
骨科机器人骨外起步较早,美国、德国、日本都有比较成熟的产品。其中基于外部固定框架结构的复位机器人尤为典型,具有两个主要结构,一个是图1(a)中的六自由度(DOF)外固定器,另一个是图1(b)中的单侧固定器。
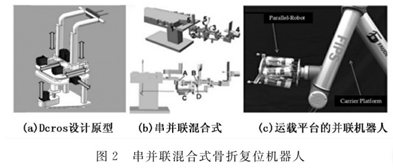
已进入临床应用基于外部固定框架结构的复位机器人如图1所示。而最为典型的应用是基于串并联混合结构的骨折复位机器人,还没有成熟的样机和商业化应用,如图2所示。
春江水暖鸭先知,许多专注于医疗机器人等医械产品设计研发的企业也纷纷入驻Medtec China 2023展会现场,包括迈得Maider,米克朗,赛能,IMA spa,欧赛斯,艾利特等,点击快速预登记,来现场看火热与前沿展品。
2 机器人系统
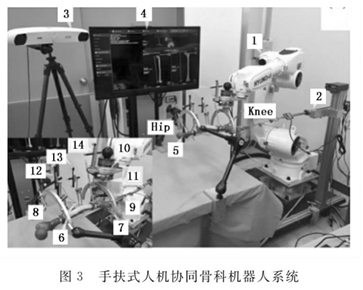
2.1 人机协同系统
骨折复位人机协同系统设计是保障病人安全和提高手术质量的一个复杂而关键的过程。临床实践表明,设计不当的设备会导致错误和相关事故。为此安全性设计是首要的,文献[10]指出骨碎片之间的安全距离:过度的牵引可能会损伤坐骨神经。虽然需要四肢的牵引运动,但必须在安全范围内。骨科医生推荐的牵引距离安全范围在近端和远端骨碎片之间为25~30 mm。尽管一些医疗设备制造商已经在其产品中纳入了人的因素原则,但在这种参与的实际性方面仍然缺乏相应的工作。
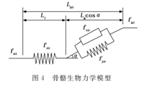
2.2 骨科生物力学机制与模型仿真研究现状
生物力学机制与模型研究用于骨科训练和手术预演,指导骨科手术机器人的控制策略和设计参数要求。有两种生物力学建模方法:质量弹簧法(如图4所示)和有限元法。目前已经有很多成功的研究工作,如利用有限元法研究腰椎、足部、手臂等的生物力学特性,但将研究重点放在腿部,尤其指导骨折复位的骨科手术方面,很少有实际的模型。
2.3 机器人控制与交互技术
骨折复位手术机器人的主要优点是通过遥控和自动控制有效地减少了辐射。不同控制技术的对比表还没有临床数据,无法给出准确的数据范围。但是,根据控制方法本身的原理推断出彼此之间的性能差异。
若您想了解更多有关人工关节等骨科相关的热点话题,加入Medtec China 202316大特色展区“第八届植入介入医疗器械中国峰会”,来自北京大学等高校的嘉宾将讲解金属植介入器械产品中的医工结合。议题覆盖金属骨科植入物的材料选择、产品设计与生物学评价、金属心血管介入器械的材料选择、产品设计与生物学评价等。
2.4 “骨一机器人”连接技术
由于机器人骨折复位手术是一种微创手术,骨 机器人连接不能由大型接触工具(如大型咬骨钳)完成。然而,放弃大面积的接触可能会降低连接的强度,即如何完全夹紧骨头来完成复位仍然是一个难题』…。常用的骨 机器人连接方法有:1)外固定销或螺钉连接(如图5所示);2)通过脚靴的连接。
3 导航系统
手术导航是一种经过计算机图像处理的可视化系统,可提供有关手术器械和植入物及其对目标器官的方向的重要临床信息。此类系统通常利用3D位置传感器进行空间定向。
为了实现精确复位,还需要进行图像配准,目前的配准策略主要有两种:一种是基于解剖统计的配准策略;另一种是基于对侧骨图像的配准策略”1…。在这两种方法中,以统计数据库中的骨模型数据或对侧重建模型数据的镜像图像作为复位准则,利用CT扫描得到的骨折近端和远端图像求解复位变换矩阵。
4 结束语
计算机辅助骨科机器人系统的主要好处是通过提高手术程序的精确性,从放射图像中消除异常值,如微创手术,并可以利用计算机辅助骨科机器人系统对新医生进行教育和培训。术前计划可以进行手术模拟,从而优化手术计划。通过使用基于体积的导航可以减少术中辐射暴露,并且通过使用机器人铣削可以显著减少术中肺栓塞的体积。手术需要额外的操作来放置和植入标记,这会导致手术时间的延长,同时也会增加失血量。在这种情况下,由于减少了辐射剂量和手术时间,透视导航是合适的。通过整合新的方法、仪器、图像混合和可视化可能性,计算机辅助骨科机器人技术在减少侵入性方面具有强大的未来潜力。
未来,骨科手术机器人将朝着低辐射、微创、操作简单、适应性强的方向发展。为保证手术的准确性,目前计算机辅助骨科机器人系统中的大部分成像和导航系统都是基于术前或术中CT数据和人工影像分割重建。医务人员和患者的累积辐射剂量仍然是一个大问题。随着人工智能的快速发展以及基于大数据的机器学习和深度学习对医学图像的自动处理,预计将实现计算机辅助骨科机器人系统的。