1.腹腔镜手术背景介绍
2.从手机器人基本结构组成
3.从手机械臂设计(重点是远心机构)
4.手术器械设计(带腕部关节的设计)
5.腕关节与小爪关节解耦设计(这是重点)
1.腹腔镜手术背景介绍
据2025医疗器械展会Medtec小编调查发现,传统的腹腔微创外科手术是借助腹腔镜和手术器械来完成手术操作的。腹腔镜和手术器械通过体表约5~10mm的手术切口进入患者腹腔,医生在腹腔镜提供的病灶区域的视觉显示下,操作手术器械完成手术任务。
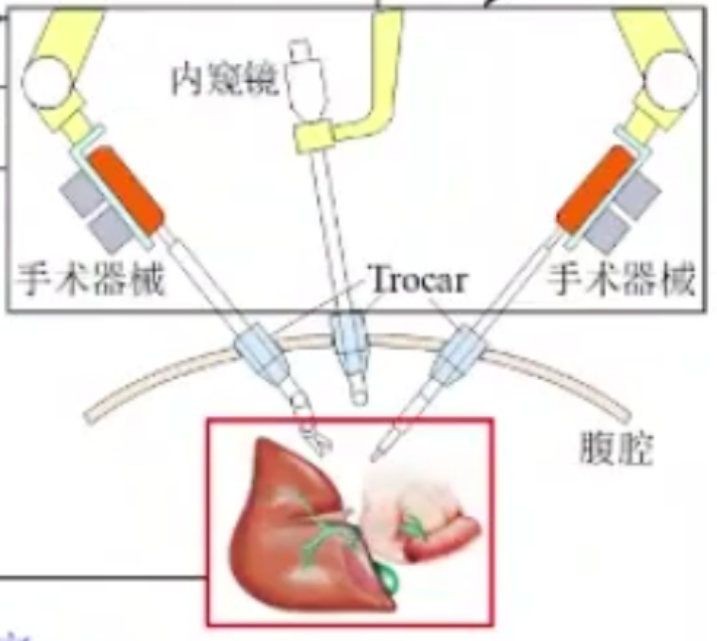
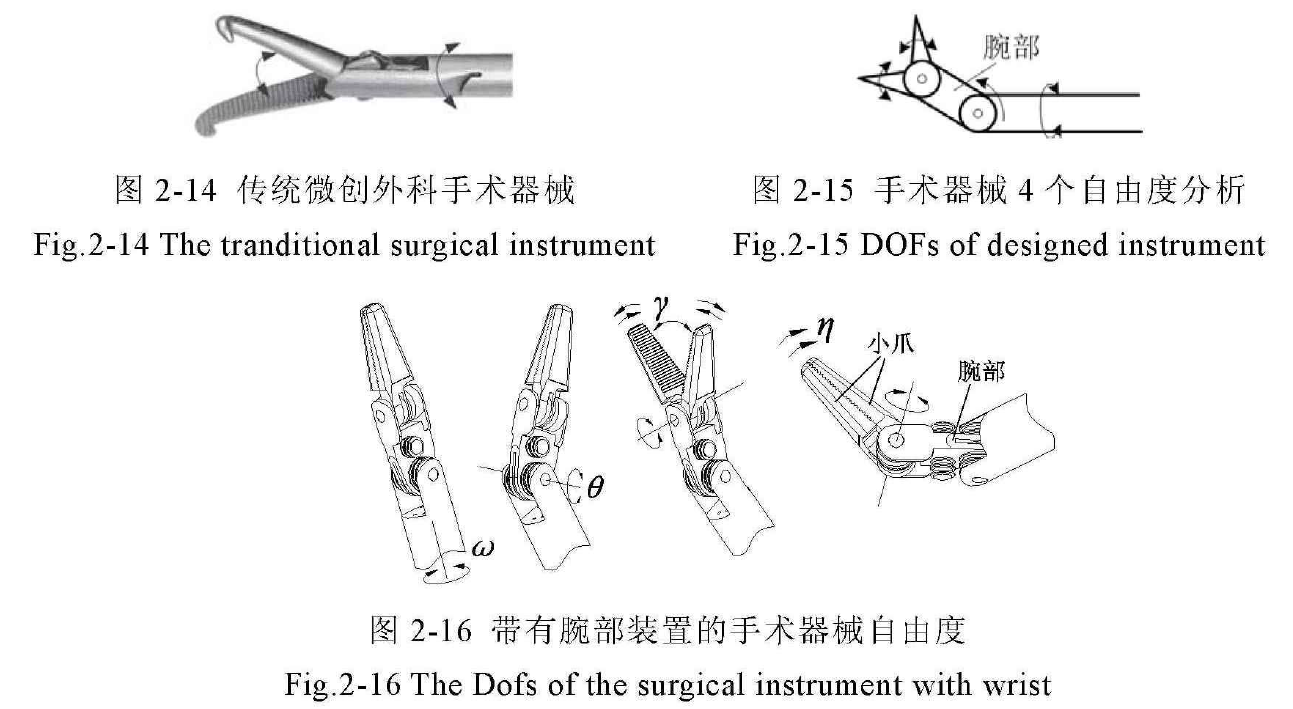
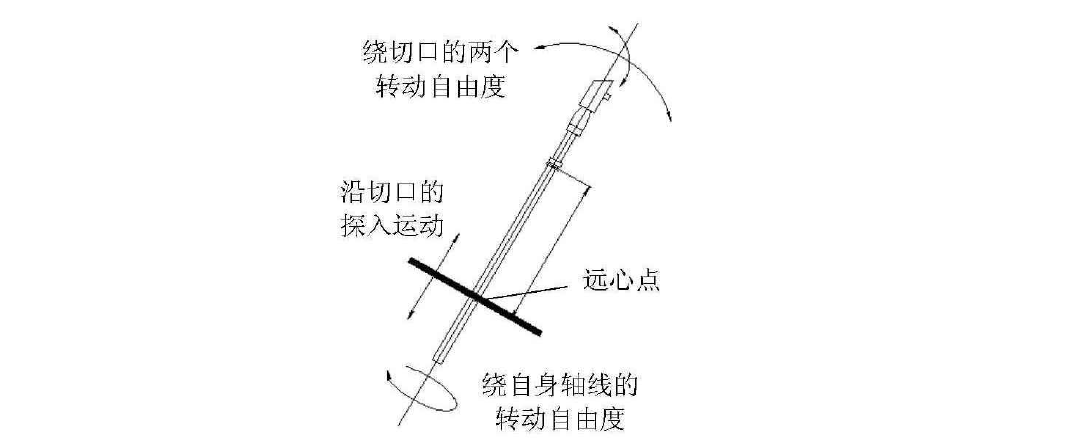
微创手术是靠手术器械和腹腔镜探入体表切口进行手术任务的,由于体表切口的限制,为保证手术的安全性,要求手术器械和腹腔镜绕体表切口做“定点”运动。手术器和腹腔镜在体表切口处的运动自由度如图所示,为防止手术器械和腹腔镜对体表切口造成划伤,要求手术器械和腹腔镜在体表切口只允许做以下四个自由度运动:沿体表切口的探入运动自由度,绕体表切口的两个转动自由度,绕自身轴线旋转的转动自由度,而手术器械和腹腔镜在体表切口处沿切口切线方向的直线运动自由度是必须被限制的。手术器械和腹腔镜在体表切口处的这种类似“定点”运动称为远心运动,手术切口称之为远心点,将实现远心运动的机构称之为远心机构。
手术机器人(从手)的结构设计重点是机械臂远心机构和手术器械。
2.从手机器人基本结构组成
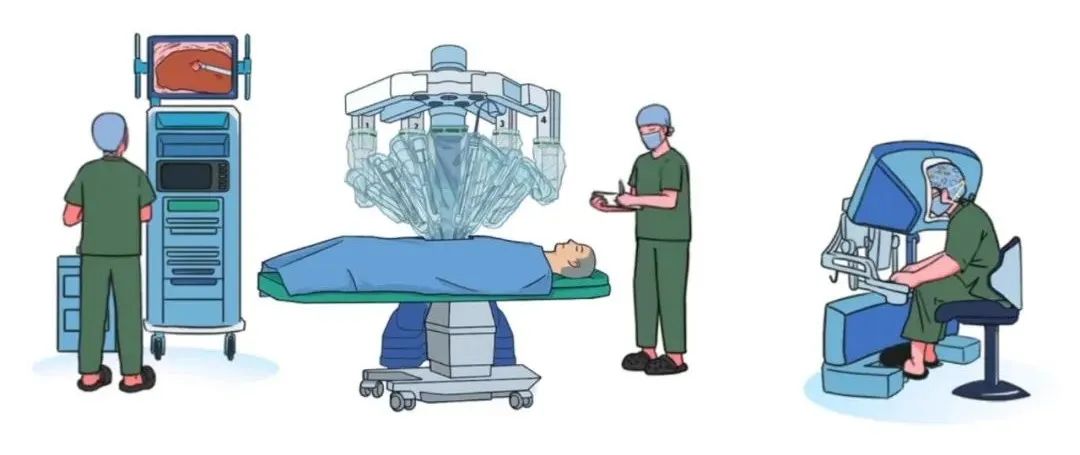
腹腔微创手术机器人系统的工作模式应为主从式操作模式,即医生通过操作主操作手来控制从手机器人运动,从手机器人的功能是代替医生把持特制的手术器械,并在医生的控制下完成手术操作的基本动作。
根据从手机器人的功能,将从手机器人的设计分为两部分,一部分是机器人车,另一部分是手术器械。机器人车由基座和数个机械臂构成。机械臂的功能相同,都是用来夹持器械完成手术操作,区别仅在于机械臂末端夹持的器类型不同。根据机械臂要实现的手术任务要求,机械臂应由定位关节和远心机构两部分构成。定位关节用来完成术前手术器械(腹腔镜)到达切口点的定位,远心机构用来夹持手术器械(腹腔镜)并保证术中手术器械的运动是围绕切口的远心运动。
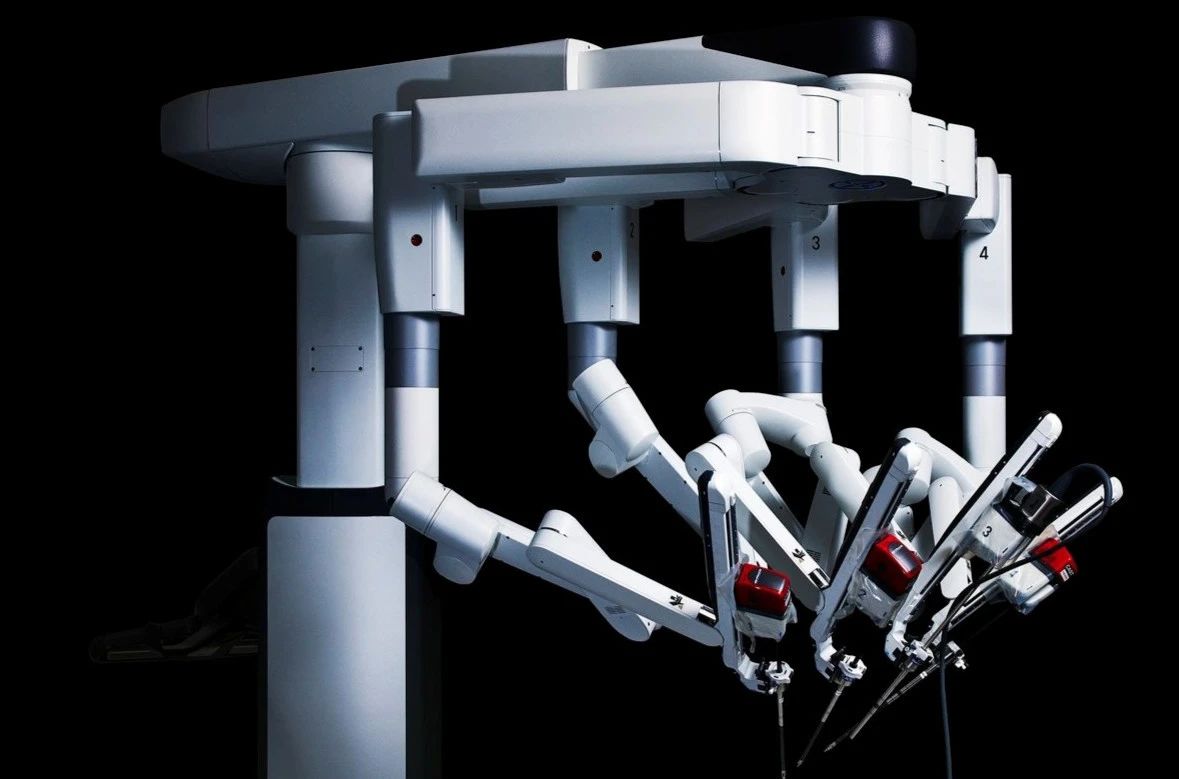
(图中为达芬奇,非论文中的机器人)。
3.从手机械臂设计
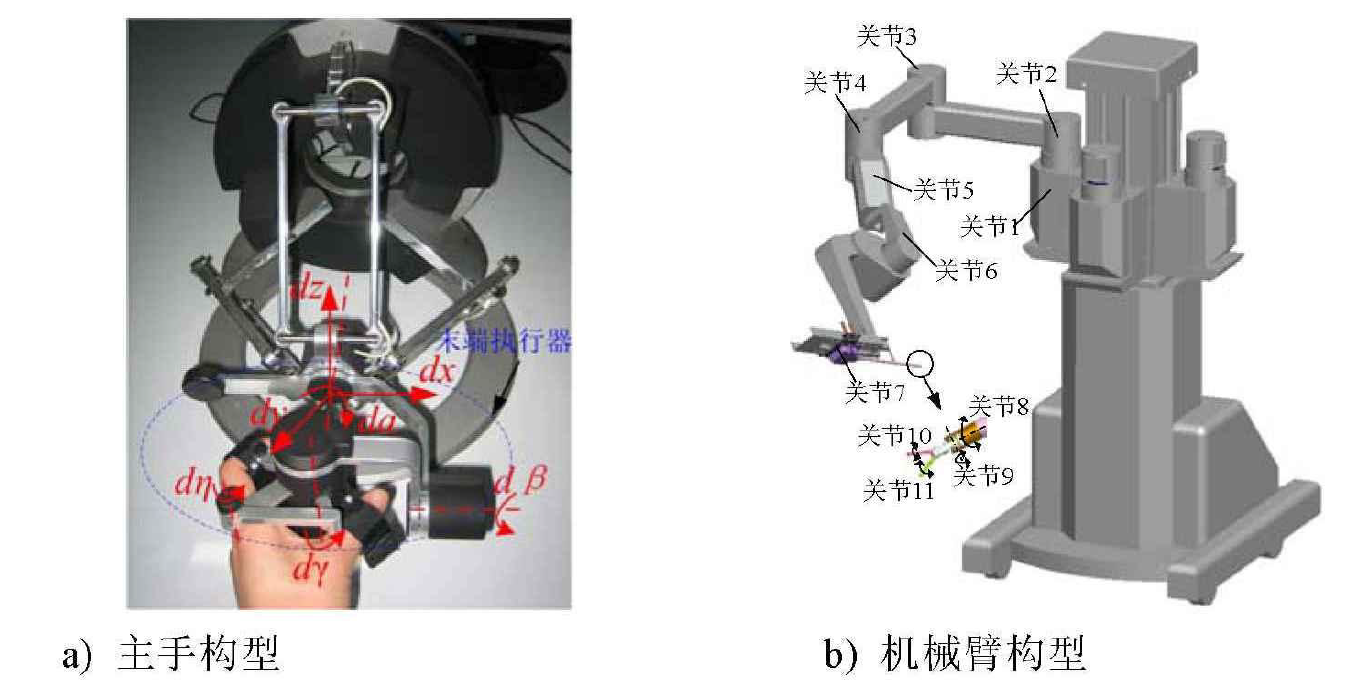
从手机器人机械臂的最终构型如图所示(跟上图中的达芬奇架构不太一样)。机械臂是具有个冗余自由度的七自由度机械臂,由定位关节和远心机构组成,关节1~关节4为定位关节,关节5~关节7组成远心机构,其中关节1和关节7为直线移动关节,其余的几个关节都是转动关节。
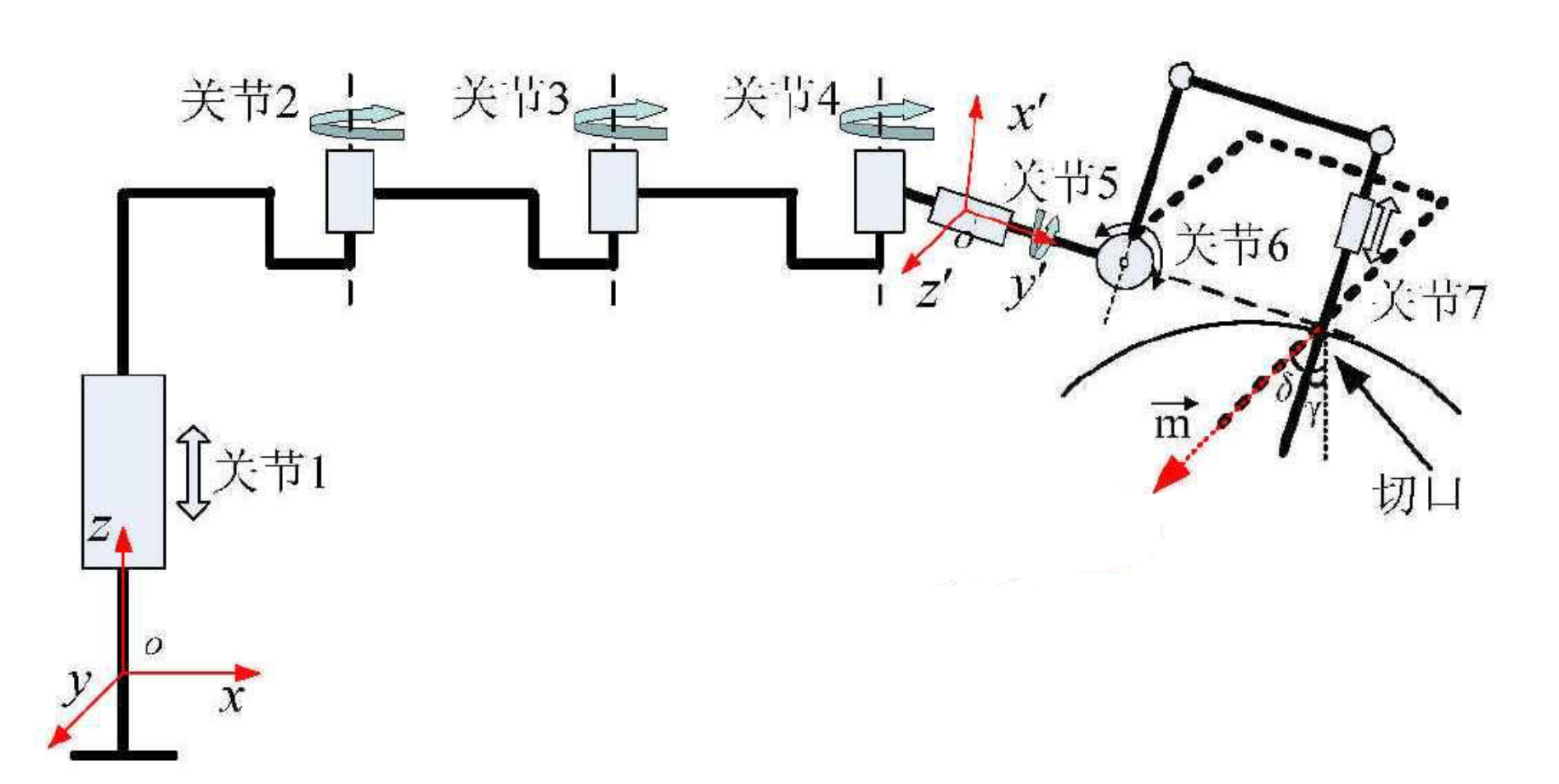
各关节的功能分别是:关节1来设置机械臂在垂直方向上的位置,使机械臂末端所夹持的手术器械(腹腔镜)在重直方向上的位置符合切口位置要求;关节2~关节4为三个平行的摆动关节,用来设置机械臂在水平方向的位置,使得机械臂末端所夹持的手术器械(腹腔镜)在水平方向上的位置符合切口位置要求;
关节5~关节7组成远心机构,用来夹持手术器械(腹腔镜)并保证手术器械(腹镜)绕手术切口做远心运动,其中关节5用来实现手术器械(腹腔镜)绕手术切口的偏摆远心运动,关节6用来实现手术器械(腹腔镜)绕手术切口的俯仰远心运动,关节7用来实现手术器械(腹腔镜)沿切口的探入运动。
为了防止手术过程中远心机构与病人身体发生干涉,根据腹部气腹形状,将远心机构设置成与水平面成30夹角的配置方式,这样可以避免与患者腹部的干涉。

4.手术器械设计(带腕部关节的设计)
手术器械安装在机械臂远心机构上,通过远心机构提供的远心运动和手术器械的自身运动自由度,实现对组织或脏器的夹持、牵引、剪切和缝合等手术操作。大部分的传统手术器械都是以连杆驱动,只具有两个运动自由度:操作杆的旋转和小爪的张合,手术操作灵活度较低。
为提高手术器械手术操作的灵活度,本文采用基于丝传动的带有腕部装置的这一手术器械构型(如图所示)进行手术器械的结构设计。与传统手术器械相比,带有腕部装置的手术器械增加了腕部的偏转动作和小爪的独立转动自由度。这样手术器械就具备了四个自由度,分别是手术器械绕自身轴线的转动自由度、腕部机构的偏转自由度、小爪绕公共轴反向运动的开合自由度和小爪绕公共轴的同向旋转自由度。
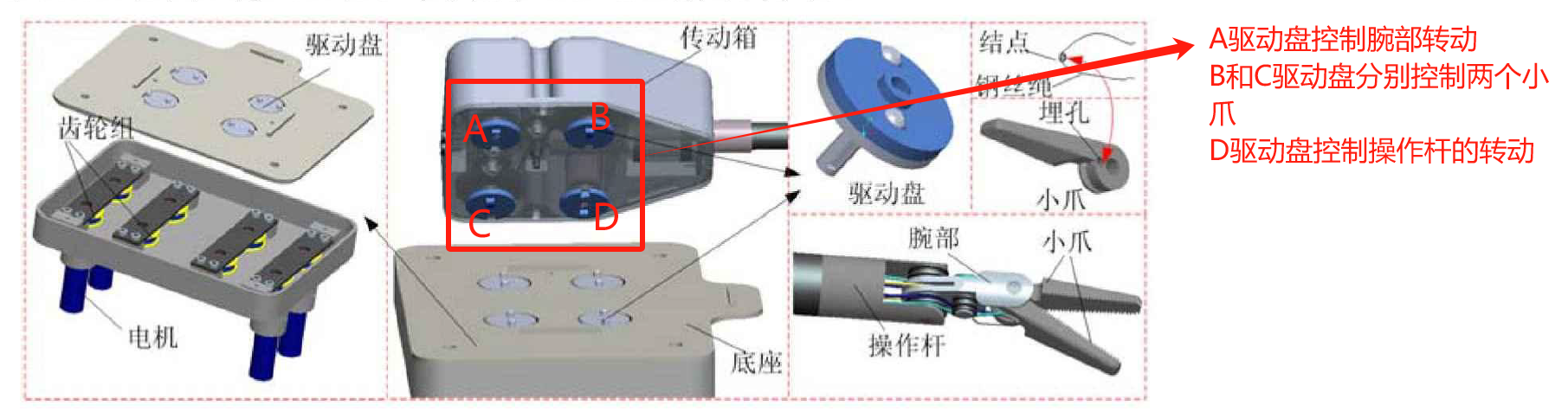
底座安装在机械臂的远心机构上,底座电机分别控制手术器的四个自由度运动,并且通过驱动盘将动力传递给传动箱。手术器的每个自由度运动均由一根钢丝绳驱动,为了实现钢丝的无滑动传动,在钢丝绳的中间打上一个小结,并将小结埋入小爪的埋孔里。由结点分开的两股钢丝绳缠绕在小爪的滑槽里,并通过导轮导向和操作杆的导向孔固定于传动箱里的消耦装置上。这样钢丝运动和小爪运动为同步运动,实现了钢丝的精确传动。
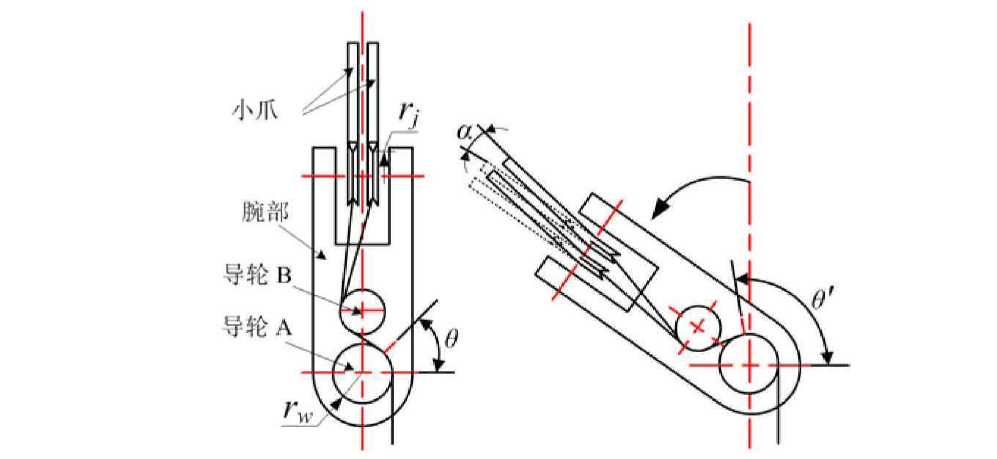
基于丝传动的带有腕部装置的手术器械这一构型提高了手术操作的灵活度,但这种构型的缺点是腕部运动和小爪运动之间存在一个耦合运动。
如图所示,腕部的一端安装在操作杆上,可以相对操作杆进行转动,小爪安装在腕部的另一端,并且相对腕部也可进行转动;导轮A和导轮B安装在腕部上,用于对驱动小爪运动的钢丝进行导向,其中导轮A的转动轴线与腕部运动轴线同轴。为了保证钢丝的精确传动,钢丝工作在无滑动传动状态。当腕部由θ运动到θ’时,驱动小爪运动的钢丝在导轮A上的包角发生改变,即缠绕在导轮A上的钢丝绳长会发生改变。又因为钢丝为无滑动传动,则腕部的运动势必会给小爪带来一个耦合运动。
伴随着腕部的运动,附加给小爪关节运动上的耦合运动是变化着的,这使得小爪的运动状态变的不可控制,不利于医生的手术操作。因此为了精确控制小爪的运动状态,需要消除腕部带给小爪的耦合运动。通过对小爪施加一个相对于耦合运动等值反向的补偿运动可以消除耦合运动对小爪运动的影响,通常有两类方法可以实现这一补偿运动:一类是用软件补偿的方法,即通过控制算法来协调腕部电机和小爪电机的运动,以此来消除小爪的耦合运动;另一类是通过机械补偿的方法,即通过一个补偿机构,当腕部运动时将腕部的一部分驱动力传递给小爪,并使小爪朝着与耦合运动相反的方向运动,以此来消除小爪的耦合运动。
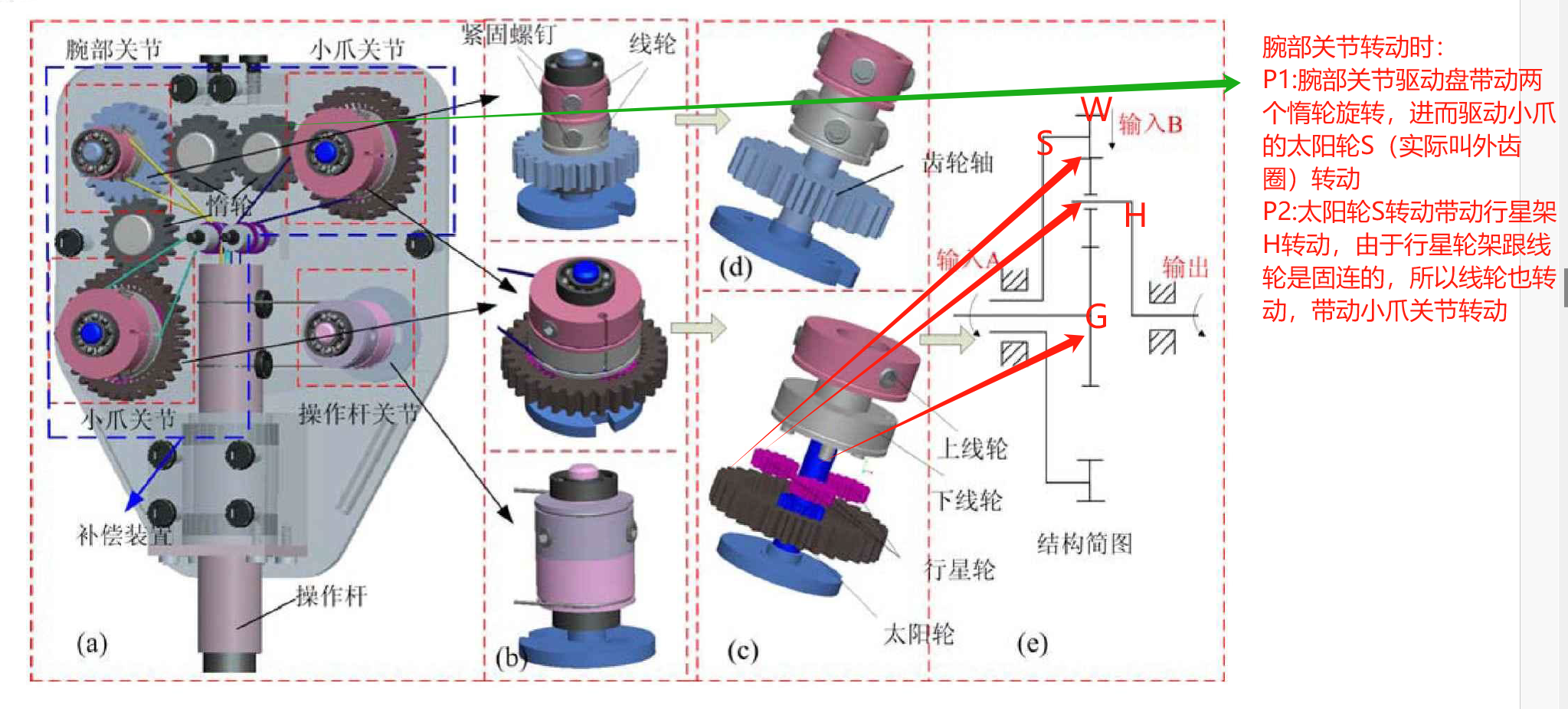
消耦补偿装置设置在动力盒中。由于手术器械的耦合运动是单向性的,即腕部的运动会带给小爪耦合运动,而小爪的运动却对腕部的运动没有影响。考虑到耦合运动的这种单向性特点,本文采用差动行星齿轮来设计消耦装置。
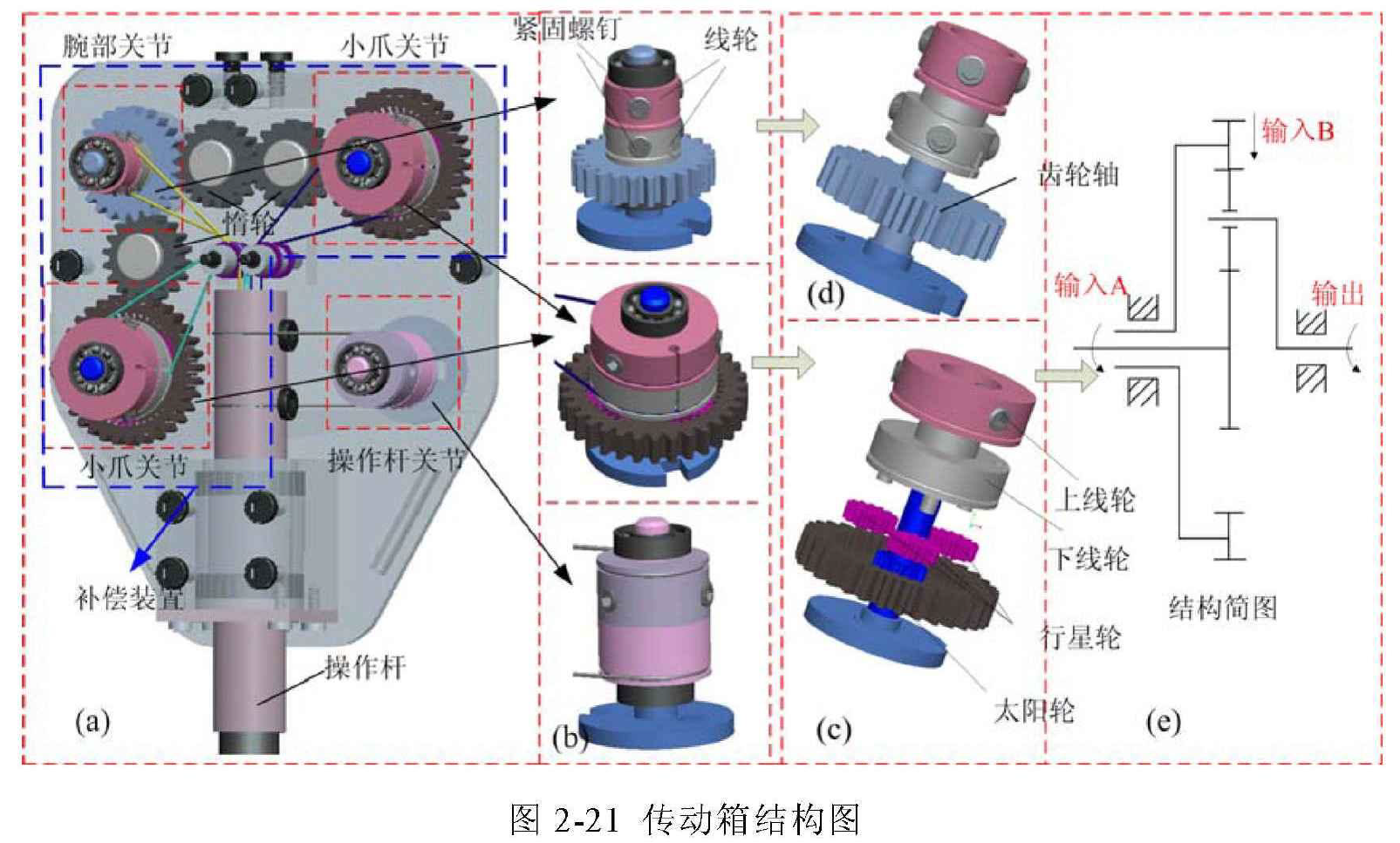
补偿装置由腕部关节和两个小爪关节组成的差动行星齿轮组构成,详细结构如图 2-21(b)(c)(d)所示。差动行星齿轮(如 图2-21(c))由齿轮轴、太阳轮、三个行星轮和下线轮组成,下线轮为三个行星轮的行星架。(注:根据机械设计基础,文章提到的齿轮轴实际上应该叫“太阳轮”,太阳轮实际上叫“外齿圈”)
当腕部关节运动时,动力由底座电机传给腕部关节驱动盘并驱动腕部齿轮轴运动,与此同时,通过惰轮的动力传递,腕部齿轮轴将一部分动力传递给小爪关节的太阳轮,小爪关节太阳轮的转动带动着三个行星齿轮一起运动,进而带动小爪关节的线轮运动,末端组件小爪得到运动补偿而消除耦合运动。小爪解耦补偿运动的动力由腕部提供,解耦运动伴随着腕部运动同时进行。
2025医疗器械展会Medtec将于2025年9月24-26日在上海世博展览馆举办,2024 Medtec汇聚近1000家来自全球近27个国家的优质品牌供应商,为中国医疗器械生产厂商提供产品研发、生产、注册所需的设计及软件服务、原材料、精密部件、自动化制造设备、超精加工技术、合同制造、测试和认证、政策法规和市场咨询服务,展品覆盖医疗器械设计与制造全产业链。Medtec China致力于为中国医疗器械生产企业技术发展提供丰富资源和先进理念,为跨国医疗器械生产商在中国设立研发和生产基地提供有力支持。点击报名参展>>>
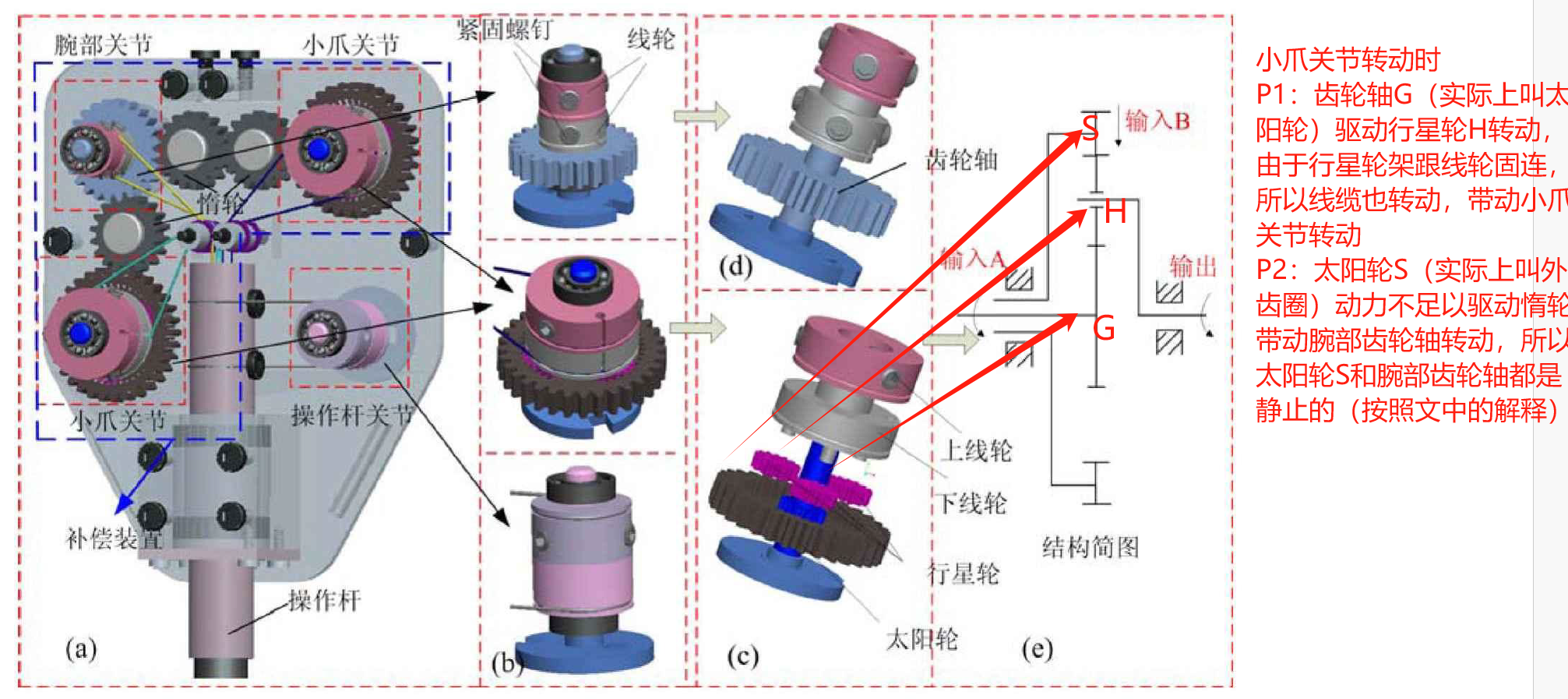
当小爪运动时,底座电机通过驱动盘驱动小爪齿轮轴运动,小爪齿轮轴的转动会带动三个行星齿轮转动,进而带动线轮运动,末端组件小爪运动。在小爪运动过程中,由于腕部关节电机处于使能状态且具有大的传动比,因此小爪太阳轮受到腕部齿轮轴阻力会静止不动(注:实际测试达芬奇4的器械,腕部关节电机即使不使能,腕部关节的齿轮轴也是静止不动的)。所以小爪的运动不会对腕部运动状态产生影响,满足耦合运动的单向性要求。
综上所述,2025医疗器械展会Medtec小编认为,小爪的实际运动量为解耦运动和电机驱动运动的叠加。通过合理设置传动装置传动比,可以实现在腕部运动的同时实现小爪的解耦运动。
具体传动比计算过程请直接参阅原论文。
最终要达到的效果就是:
1.电机驱动腕部关节盘时,器械末端只有腕部关节转动(小爪不动)
2.电机驱动小爪关节盘时,器械末端只有小爪关节转动(腕部和另外一个小爪臂不动)
这样电机的转动跟末端执行机构的转动就可以做到一一对应了。
-
腹腔微创手术机器人系统关键技术研究_冯美
-
达芬奇手术机器人机械臂的拆卸—中文字幕_哔哩哔哩_bilibili
文章来源:冯美教授博士论文《腹腔微创手术机器人系统关键技术研究》