






面向医疗应用的气压式液位传感器设计方案
2021-03-26
1、概述
液面探测在医疗检验科设备和实验室设备中应用广泛, 为了提高反应效率, 减小试剂消耗, 需要加样针对液面进行快速精确的响应。目前主流的探测方法有电容式和气压式两种, 一般而言电容式方法具有更快的响应速度和更高的检测精度, 比如PCS0902可以对低至数十微升的试剂进行微秒级别的响应. 但是对于电导率较高的试剂或离子溶液, 采用电容式方法需要执行严格的隔离程序以排除后端液路的影响, 这样对于结构和软件的要求会比较高, 本设计采用嵌入式信号处理器和成熟的MEMS气压传感器,以及专用低漂移低延时滤波算法,实现TIP头液面的气压式高精度快速检测功能。
2、检测原理
气压传感器是本方案的核心器件, 为了提高灵敏度和稳定性, 厂商一般采用MEMS工艺制造, 可分为电容式和电阻式, 通常在受力平面上分布四个形变电阻或电容, 利用桥式电路检测微小的压力变化, 其检测精度可以达到0.005hPa,如下图3-1所示。根据参考压力点的设计不同, 可分成表压,差分式和绝对式三种类型;根据输出接口类型不同,可分为数字式和模拟式。数字式传感器集成比较简单, 但是通常以牺牲响应速度, 精度和灵活性为代价,而且由于采样和量化环节均在芯片中固化, 后端很难再根据应用场景做优化调整。 本模块选用模拟差分式气压传感器进行方案设计。
 图3-1
图3-1
在移液应用中, 泵和气压传感器, 枪头布置在一条封闭的管路L中, 如下图3-2所示。当加样臂下降时, TIP头接触液面, 引起封闭管路L中的压力变化, 从而使得模块能够检测到液面。当加样臂在进行抽取液体样本时, 封闭管路L中维持特定的负压值, 如果发生了凝块堵塞TIP头的情况, 压力值急剧下降, 传感器将能够检测到此异常。当加样臂在进行吐液操作时, 封闭管路L中维持特定的正压值, 如果发生了凝块堵塞TIP头的情况, 压力值急剧上升, 这种异常变化同样能被模块检测到。
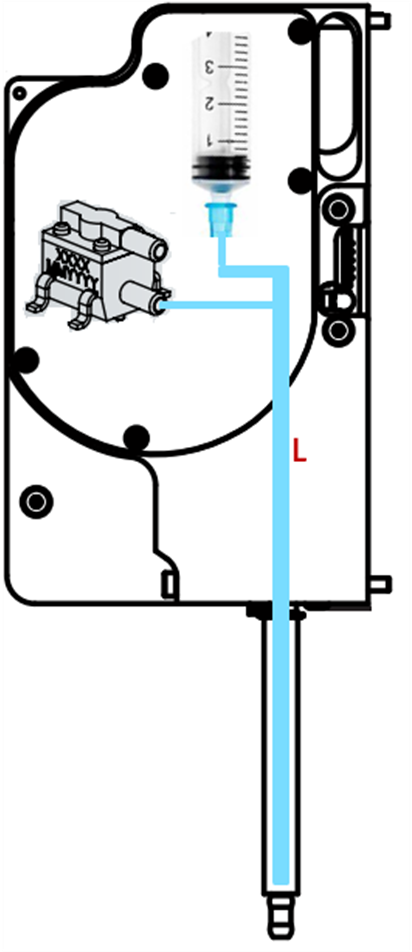 图3-2
图3-2
3、系统概要设计
本模块主要由气压传感器, 偏置接口电路, 及微处理器等部分组成, 如下图4-1所示。其中采样, 滤波及补偿等任务在微处理器中完成。模块通过中断信号和CAN总线与上位机交互, 获取参数配置及工作模式控制信息, 输出结果数据及中断电平。
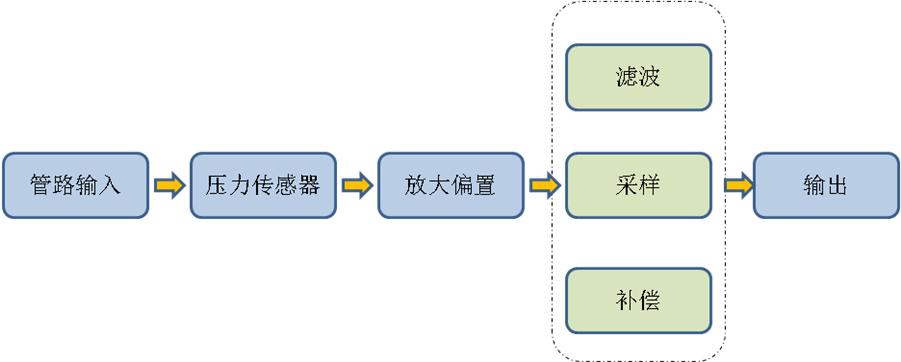 图4-1
图4-1
3.1气压输入
根据移液应用要求, 如前述选择差分式气压输入, 并将其中一路通过密封管路连接到图3-2所示的管路L中。由于传感器安装在PCB上, 为了方便密封连接, 可选用带锥形接口的传感器, 需要注意的是, 为了使模块能在不同海拔高度正确检测微小压差, 另一路参考管路应通过阻尼棉与大气联通, 如下图4-2所示, 一方面滤除瞬时高频压力干扰, 另一方面能跟随海拔高度的微小变化(因为高精度传感器对高度变化非常敏感), 结构设计上需要综合考虑预留管路空间。
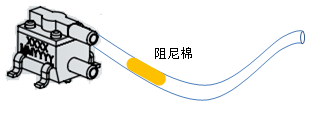 图4-2
图4-2
3.2放大偏置
由于差分模拟量输出的气压传感器本质上是一个电阻或电容桥, 因此信号必须经过偏置,耦合, 放大等预处理才能送到采样保持器。以26PC系列为例, 在5V供电时, 其输出最大量程值范围为+2.4~+2.6V, 而且由于振动,声压扰动等因素的存在, 当输入压差为0时, 输出电压将不会是+2.5V基准点, 因此在信号被放大采样之前, 必须进行预处理, 电路如下图4-3。
其中R1~R4是传感器内部电阻压电电阻, 从传感器出来的低幅值差分信号先经过前置滤波, 再通过偏置和放大, 将输出点设在1.65V上, 然后通过缓冲器送到S/H, 以便适配目前主流的3.3V嵌入式处理器输入引脚。
D1~D3提供电源端简单的温偏补偿, 也可以采用一个电流源代替, 从而实现更精确的温偏补偿。由于信号幅值低至1mV, 需要采用高精度(1‰)低温度系数的电阻, 及低失调高带宽的运放器件。
 图4-3
图4-3
3.3信号采样
仍然以26PC为例,其响应时间为最大1ms, 以平均值500us计算, 根据采样定理, S/H最低频率应该为4khz, 电路的前端信号波形如下图4-4所示, 当静态工作点在1.65V时, 26PC01在量测范围内每输出0.5%psi增量,即83.5uV, 按照扩大200倍计算, OP的增益带宽最低需要满足800khz,而输入偏置电压应该小于80uV, 前端差模和共模滤波频点也需要对应设置如下。
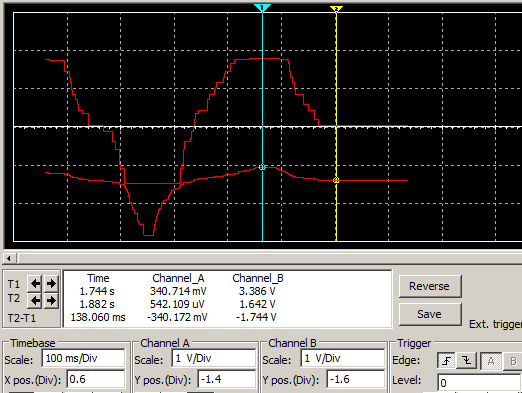 图4-4
图4-4
3.4滤波
除了在前端电路中用硬件方式做共模和差模滤波, 主要的信号处理采用软件数字IIR滤波器。这个与PAS0700类似, 首先根据传感器的响应特性, 设计一个Butterworth低通, 如下图4-5, 根据处理器MIPS及浮点运算的能力, 综合考虑阶数(N <= 8), 滤除泵马达高频声波等噪声(Wc <= 3khz); 然后根据获取的原始采样数据做FFT分析中低频段内的陷波和低频阻带, 滤除工频,温漂, 机台或加样臂振动等噪声范围。
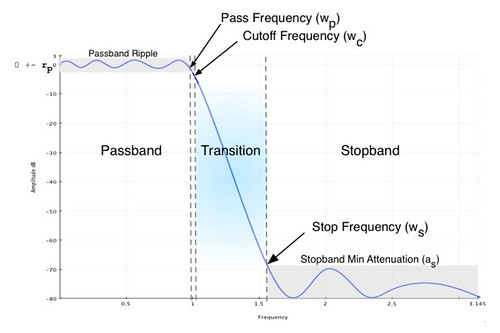 图4-5
图4-5
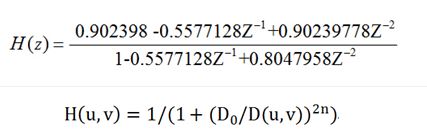
用于工频及其倍频的陷波滤波器, 其阶数不会超过3, 如下传递函数1; 处理温度缓慢漂移的高通, 与麦克风的低频滤波类似, 如传递函数2; 对于特定的振动噪声频谱, 对应的带通阶数可能稍微大一点。
 考虑到CANOPEN通讯协议及其他中断处理, 总的滤波器运算开销, 应该限制在150us/Cycle以内, 比PCS0902的滤波器略小, 否则就需要选用MIPS更高的处理器了。
考虑到CANOPEN通讯协议及其他中断处理, 总的滤波器运算开销, 应该限制在150us/Cycle以内, 比PCS0902的滤波器略小, 否则就需要选用MIPS更高的处理器了。
3.5补偿
MEMS器件气压传感器具有较大的温度敏感性, 因为温度极易导致内部压电材料发生变形, 同样晶圆也会由于温度变化而导致连接部位出现应力变形, 从而导致测量结果出现偏移, 在不同时间, 不同的工作地点都可能会带来较大的偏差。除此之外, 工作站的安装, 气流, 振动等因素也会带来一定偏差, 通常这些因子不会影响到传感器的量程和敏感度, 也就是说, 其传输函数仍然遵循y = mx + b的形式, 如下图4-6, 因此软件上可以采取相应的补偿措施。
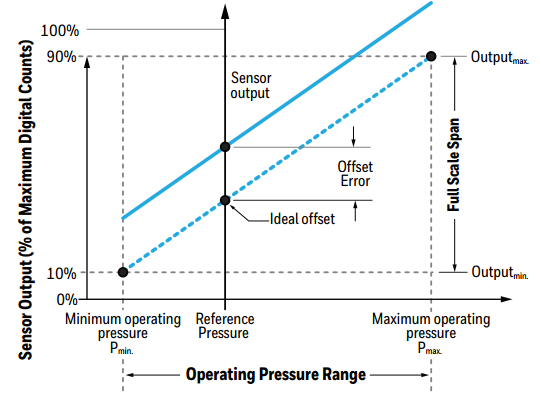 图4-6
图4-6
补偿过程分为以下几步:
①首先, 在给定压力pressure时, 传感器的输出电压值满足以下方程:
 其中, Pmax是最大工作气压, Pmin是最小工作气压, Vmax和Vmin则分别对应这两种情况下的输出电压。
其中, Pmax是最大工作气压, Pmin是最小工作气压, Vmax和Vmin则分别对应这两种情况下的输出电压。
②第二步, MCU获取到经过滤波后的电压值后,根据前述电路放大偏置系数, 换算成传感器输出电压Voutput, 然后再根据上式计算pressure:
 ③第三步, 用计算所得压力值减去参考压力值(比如默认当前为0), 即可得到补偿压力值:
③第三步, 用计算所得压力值减去参考压力值(比如默认当前为0), 即可得到补偿压力值:
Calib_pressure = pressure – Ref_pressure
④第四步, 在后续操作中, 使用每次量测计算后得到的压力值减去Calib_pressure, 即可得到校准之后的压力值, 直到下一次校准更新Calib_pressure.
3.6状态机与流程
嵌入式软件主状态机,以及校准和传感器例程分别如下图示。其中占用处理时间最多的是Filter例程, 涉及到相当数量的浮点运算, 如果比照PCS0902, 选用100Mhz以上带硬件FPU的处理器, 单一流程周期的总时间可以控制在150us以内。
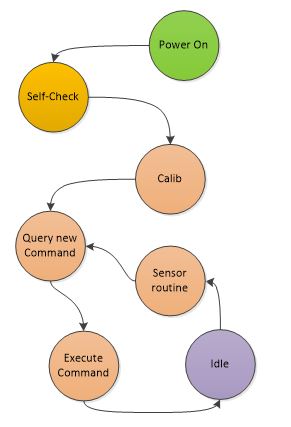 图4-7
图4-7
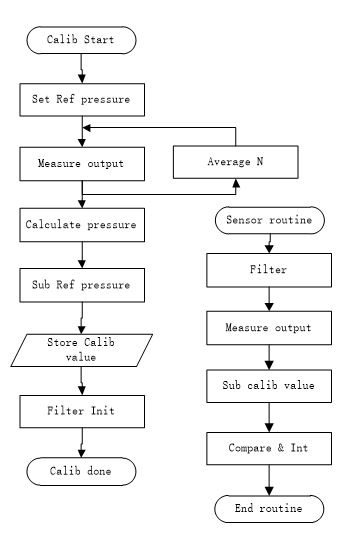 图4-8
图4-8
4、主要设计指标
本方案模块的技术指标主要包括检测精度, 线性度, 响应时间, 工作区间, 过载范围, 温度范围等。其中检测精度和响应时间对于移液应用来说是最重要的两个指标, 以下分别详述。
4.1检测精度
在某些移液应用中, 由于导电碳素TIP头成本较高, 需要采用一次性绝缘TIP头, 这种情况下电容式或电感式液位传感器可能会大幅降低其灵敏度, 因此需要气压式液位模块能够达到或接近PCS0902的检测精度, 比如20uL的H2O, 以此为例, 下面计算相关的约束条件。
以20uL常用一次性TIP为例, 其结构尺寸如下图5-1:
 图5-1
图5-1
29mm的锥形腔体总体积是20uL,假设液面最大允许插入深度为5mm,则管内的压强增加值为:
而26PC01的精度为+/-0.5% psi, 即约为34.5Pa, 所以理论上应该是可以探测到液面, 但已经非常接近传感器的极限了。如果选用BM1383传感器, 精度范围为12~100Pa, DPS3130则是6~100Pa, 一致性可能会变得更差一些, 而26PC01的国产替代品SPRA001, 精度也只能达到+/-2%psi, 另外一些传感器只能通过空气, 比如SDP3x, 不适合此类场景。事实上, 5mm的TIP浸入深度在小体积的移液中已经很深了, PCS0902在探针运动下降过程中检测10uL的液体, 浸入深度仅为1mm左右, 由此可见与PCS0902等专用电容式液位传感器相比, 气压式在小体积高精度液面探测应用中有实质性的瓶颈, 可能更多会用作检测凝块堵塞等补充用途。
4.2工作区间
由于高精度的气压传感器的过载区间比较小, 因此需要计算在最大移液量时的工况。下面以1250uL的大容量TIP头为例, 其结构如下图5-2:
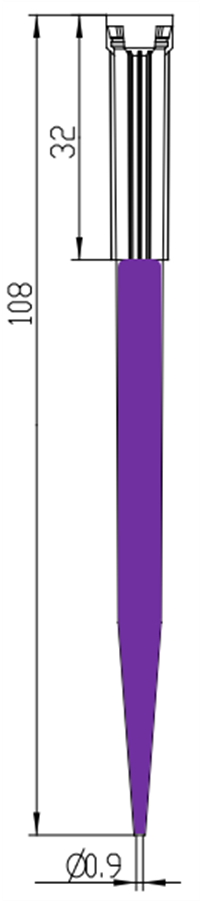 图5-2
图5-2
当TIP头在以流速V抽取1250uL的液体即将结束时, 传感器承受的压强差最大。
假定抽取速度为500uL/s, 按照1mm3归一化, 则有:
 就是说在正常工况下, 以500uL/s的速度抽排1250uL的H2O, 传感器端口的最大压强差占26PC01满量程的约15%, 余量还是比较充足的。
就是说在正常工况下, 以500uL/s的速度抽排1250uL的H2O, 传感器端口的最大压强差占26PC01满量程的约15%, 余量还是比较充足的。
4.3响应时间
响应时间主要取决于传感器选型, 26PC系列为1ms; BM1383为6ms,另加I2C传输时间约80us; DPS3130则高达27.6ms。其他时间消耗主要是滤波器计算时间, 预留150us, 前置滤波电路的延迟小于10us,可以忽略。所以如果选用26PC系列, 能达到的最快响应时间大约为1.16ms, 这比PCS0902的100us响应时间高了一个数量级, 可能会导致在小体积液面探测应用时出现撞针故障。
 图5-3
图5-3
5、电气集成
主要描述模块对于电源, EMC, PCBA等方面的要求和影响。
5.1电源
本模块方案的核心, 本质上是一个精密模拟信号处理电路和数字滤波器的有效结合。由前述参数计算可知, 要想获得期望的精度和一致性, 必须确保前端电路的uV级有用信号不被常见的各种mV级噪声源淹没, 而电源是最重要的因素之一。
26PC系列采用2.5~16V电压供电,基于噪声纹波要求, 不能直接采用DCDC供电, 需要经过一个低噪声的LDO如ADP7104等, 使得在3khz带宽以内的均方根噪声低于40uV RMS, 某些LDO的相位裕度较低, 所以应该尽量选用定点输出而不是可调输出的器件, 如下图6-1所示:
 图6-1
图6-1
另外, PSRR也需要在3khz附近达到60dB左右, 通常在这种小电流负载下低噪声LDO能够达到期望的效果。如果实测仍然需要改善, 可以在LDO电流中采用前置和后置滤波, 如下图6-2所示:
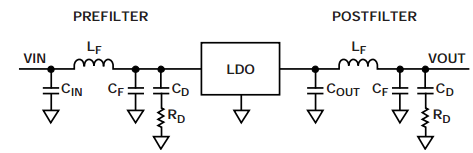 图6-2
图6-2
另外遵循一般规则,所用电容应选择低ESR及0ppm/°C温度系数的Class1陶瓷电容。
5.2PCBA
PCB布局布线对于敏感小信号的影响是毋庸置疑的, 除了一些基本的规则, 比如数字和模拟信号的分区与地平面回路切割, 输入端到OP之间的差分走线, 元器件的位置与信号分层等等, 还需要额外关注寄生电感和电容对放大偏置电路的影响, 以确保电路按照设计参数范围工作。 此外, 基于气压传感器的特殊性质, 在布局和SMT工艺中需要特别注意以下环节:
传感器的背面PCB区域不能放置元器件;
安装孔和应力集中点应远离传感器;
SMT拾取机构在夹取器件时应选择管路接口部位;
不能使用真空吸嘴, 确保传感器的两个管路口始终处于标准大气压下;
在使用锡膏或者定位胶时,避免堵住传感器的气孔;
PCBA完成后不能使用超声波清洗;
尽量减小工艺过程中的一切振动和应力;
过回流焊时严格遵循器件的温度曲线, 如下图6-3:
 图6-3
图6-3
5.3传感器选型
以下是几种常用气压传感器的参数表:

6小结
以上围绕气压式液位传感器的方案设计, 详细描述了与设计精度, 响应时间等关键指标相关的设计要点, 并从结构, 电路, 信号处理, 工作流程, 生产制造等各个方面讨论了需要考虑的重点, 希望能帮助相关仪器工程师梳理思路, 少走弯路, 更快的实现产品方案。
7、单位换算与术语
1 in. H2O (@ 0°C) = 3.6127×10-2 psi
1 in. H2O (@ 20°C) = 3.6063×10-2 psi
1mm H2O (@ 0°C) = 1.4223×10-3 psi
1mm H2O (@ 20°C) = 1.4198×10-3 psi
1 in. Hg (@ 0°C) =0 .49118 psi
1mm Hg (@ 0°C) = 1 TORR = 1.9337 ×10-2 psi
1 bar = 14.504 psi
1mbar = 1.4504×10-2 psi
1 Pa = 1.4504×10–4 psi
1 kPa = 0.14504 psi
ATM = 14.696 psi
°C = (°F – 32)/1.8
°F = (1.8 × °C) + 32
Key:
psi = lbs. per square inch
in. H2O = inches of water
in. Hg = inches of mercury
mm Hg = millimeters of mercury
bar = bar
mbar = millibar
kPa = kilopascal = 1000 (N/m2)
ATM = atmosphere
Pa = pascal
文章及图片来源:电子工程专辑


