






医疗器械展前沿探索桌面级六轴协作机器人机械臂在教育医疗场景下的应用
2023-06-29
机械臂是机器人技术领域中得到最广泛实际应用的自动化机械装置,在教育科研、商业应用、医疗健康等领域都能见到它的身影。
尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
在教育医疗领域,机械臂可以分发口罩、全自动移液、为运动与语言障碍者传输指令等。
因此机器人系也成为了医疗器械展Medtec China 2024的吸睛单品。春江水暖鸭先知,许多专注于医疗机器人等医械产品设计研发的企业纷纷入驻 医疗器械展Medtec China 2024展会现场,包括迈得Maider,米克朗,赛能,IMA spa,欧赛斯,艾利特等。
1分发口罩
印度尼西亚北苏门答腊大学计算机科学和信息技术学院研究使用机械臂分发口罩。
新冠病毒传播迅猛,为了帮助减少工作人员因接触造成的感染风险,海外用户使用myCobot对过往人员进行口罩佩戴识别,对于未佩戴口罩相关人员进行分发口罩,并且已经把相关的应用撰写成论文。
脸部识别过程使用opencv的Haar Cascade Classifier 算法以及svm分类检测人员是否有带口罩,对于被检测为未佩戴口罩的人员,myCobot 280 Pi 将会用吸泵吸取一个口罩发放给用户。
myCobot 280 Pi是桌面级六轴协作机械臂,采用树莓派微处理器,内置ubuntu18.04系统,无需搭配PC主控,链接外设,即可快速构建机械臂应用场景。 
来源:
数据科学 :计算与应用信息学杂志
https://talenta.usu.ac.id/JoCAI/article/view/9289/5173
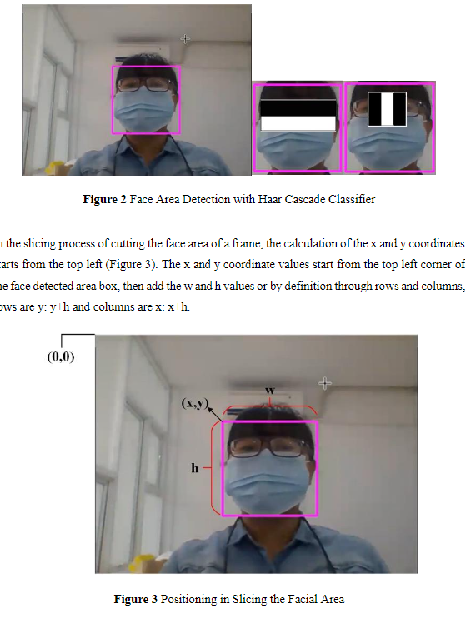
2基于眼动追踪的机械臂控制系统
东南大学研究团队利用眼动技术开发了一种基于眼动追踪的非侵入式机械臂控制系统。
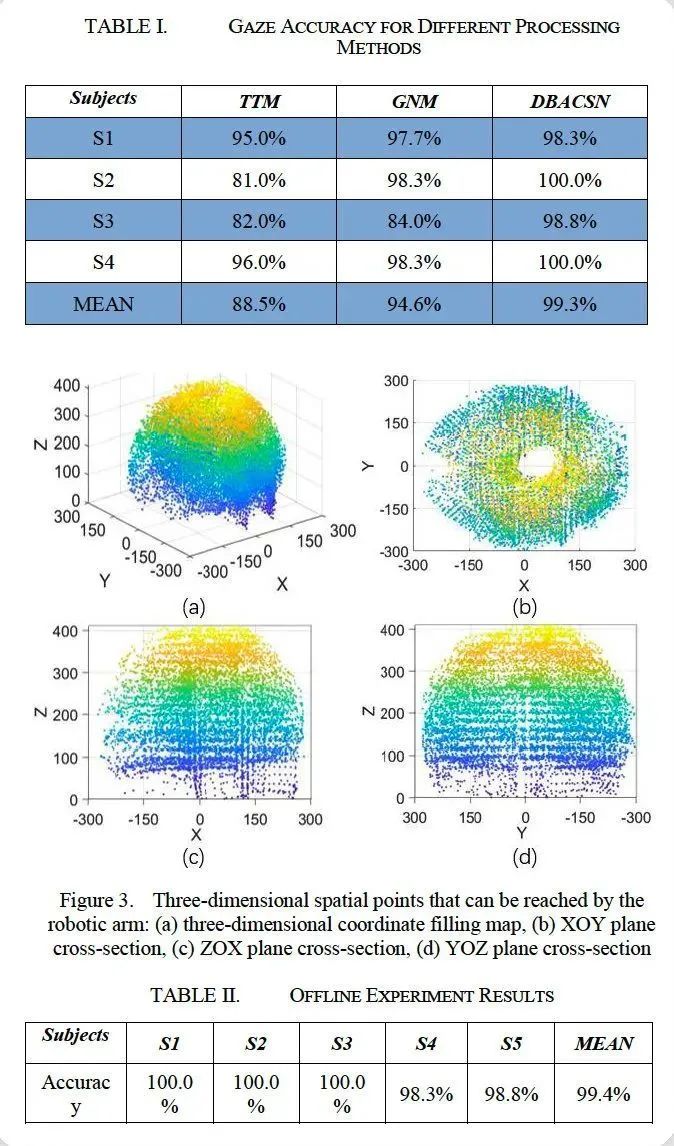
有严重语言和运动障碍的人,由于无法有效的控制肌肉的移动,可能存在与外部世界沟通困难的情况。在本研究中,开发了一种基于眼动追踪的非侵入式机械臂控制系统。在充分考虑机械臂的空间特性后,进行了以用户为中心的设计过程,其中包含八个命令和一个中间实时视频传输用户界面。此外,评估了三种眼动注视点处理算法。其中,基于密度的空间聚类和噪声算法的平均准确率达到了 99.3%。在此基础上,设计并进行了离线实验,5名被试都能够发送准确率高于 99% 的命令。
A、硬件本研究中使用的机械臂控制系统包括机器人手臂、眼动追踪设备和用户界面。
myCobot 六轴协作机器人本实验机器人使用的是协作机器人手臂,该系统是一个多功能、轻量级的智能机器人。由大象机器人开发,具有丰富的硬件和软件交互和多种兼容性。机器人有效支持多平台二次开发帮助用户进行多场景开发。
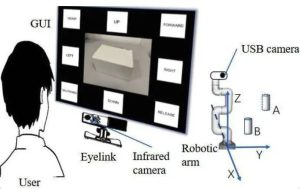
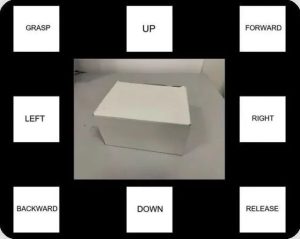
B、用户界面设计实验的刺激界面包括八个矩形框和实时摄像机的传输屏幕共有九个区域。在九个区域中,位于左上角和右下角标记为抓住/释放标签,用于控制机器人手臂展开。其它六个标签被标记为向上、向前、向左、向右、向后和向下。这六个矩形框表示六个机械臂移动方向:向上、向前、向后,向左、向右、向下。
C、 程序本研究的离线实验流程设计为:基于初步实验的结果。被试首先听到0.5秒的声刺激。然后,为了确保实验的随机性,用户界面上的八个矩形命令框随机出现一个红色方框,以提醒被试,持续2秒。同时,试次间隔也是2秒。一共进行10次,根据离线实验流程,被试做出选择,并计算其准确度。
数据处理和分析
A、 眼动信号处理使用MATLAB 2020将EDF格式转换为可被识别的MAT格式。
B、 焦点分析为了获得更高的注视精度,进行了预实验。使用三种方法:阈值法(TTM),高斯归一化方法(GNM)和基于密度的聚类用于处理被试的注视点数据的算法。
C、 机械臂的智能规划采用智能规划算法控制机械臂末端执行器以指定的姿态移动到指定点。
结果:
结论:
本研究开发了一种基于眼动跟踪控制的机械臂控制系统,以帮助有运动障碍的人进行康复或执行日常任务。东南大学研究团队首先使用机械臂路径智能规划算法获得三维空间数据,然后拟合机械臂的工作盲区。并比较了三种估计用户注视点的算法,并在预实验中比较了它们的性能。在离线实验中,基于DBSCAN算法设计了一个具有八个命令和实时视频回放的GUI,以控制机器人手臂完成拾取和放置任务。对图形用户界面的创新设计以及DBSACAN算法的评估和使用改善了人眼追踪中的人机交互困境。
来源:
2022年计算机工程和人工智能国际会议(ICCEAI)
https://ieeexplore.ieee.org/document/9853331
3配液机器人
日本工业大学就使用mycobot 280二次开发成液体医药品的「配液机器人」,用于制备放射性药物,无需人工干预即可准确自动配液,这一实验,使「国产机械臂」在海外引起广泛关注。
(安装mycobot桌面机械臂)
(拖动示教)
(mycobot摇晃液体)
海外教授表示,使用的是mycobot 280,首先,因为其性价比较高,只需千元,可降低学生设备使用成本;其次,因为比较小和轻,易于拆卸和携带,方便与企业交流做实际场景应用;最后,困难在于位置精度± 0.5mm,重复定位精度能满足要求。
(mycobot抽液体)
(mycobot取液体)
还表示,学生能够使用学校学习的的知识应用到生活场景当中,意义重大。这不仅可以用于医院,也可以用于灾难医疗环境,处理可能具有传染性的危险物质准备。
来源:
https://www.iwanichi.co.jp/2022/05/12/7832901/
医疗器械展发现,myCobot 280 系列是世界最小最轻的六轴协作机器人,体积小巧但功能强大,具备丰富的软硬件交互方式及多样化兼容拓展接口,支持多平台的二次开发,有效帮助用户实现多场景的应用。

大象机器人决心打造「中国制造」的机器人品牌并且在教育领域深耕,加大校企合作力度,促进产学研一体化建设,与学校及教育机构共同解决机器人教育在产品与配套设施上的需求痛点,加速机器人、自动化与人工智能等专业人才的培养与储备,推进机器人技术与教育的深度融合与普及推广,推动「中国制造」走向世界。
文章来源:大象机器人


